Visible to Intel only — GUID: GUID-901B4568-D14F-4ABB-ACFD-39DBE23E5E9B
Getting Help and Support
What's New
Notational Conventions
Overview
OpenMP* Offload
BLAS and Sparse BLAS Routines
LAPACK Routines
ScaLAPACK Routines
Sparse Solver Routines
Extended Eigensolver Routines
Vector Mathematical Functions
Statistical Functions
Fourier Transform Functions
PBLAS Routines
Partial Differential Equations Support
Nonlinear Optimization Problem Solvers
Support Functions
BLACS Routines
Data Fitting Functions
Appendix A: Linear Solvers Basics
Appendix B: Routine and Function Arguments
Appendix C: Specific Features of Fortran 95 Interfaces for LAPACK Routines
Appendix D: FFTW Interface to Intel® Math Kernel Library
Appendix E: Code Examples
Appendix F: oneMKL Functionality
Bibliography
Glossary
Notices and Disclaimers
mkl_?csrgemv
mkl_?bsrgemv
mkl_?coogemv
mkl_?diagemv
mkl_?csrsymv
mkl_?bsrsymv
mkl_?coosymv
mkl_?diasymv
mkl_?csrtrsv
mkl_?bsrtrsv
mkl_?cootrsv
mkl_?diatrsv
mkl_cspblas_?csrgemv
mkl_cspblas_?bsrgemv
mkl_cspblas_?coogemv
mkl_cspblas_?csrsymv
mkl_cspblas_?bsrsymv
mkl_cspblas_?coosymv
mkl_cspblas_?csrtrsv
mkl_cspblas_?bsrtrsv
mkl_cspblas_?cootrsv
mkl_?csrmv
mkl_?bsrmv
mkl_?cscmv
mkl_?coomv
mkl_?csrsv
mkl_?bsrsv
mkl_?cscsv
mkl_?coosv
mkl_?csrmm
mkl_?bsrmm
mkl_?cscmm
mkl_?coomm
mkl_?csrsm
mkl_?cscsm
mkl_?coosm
mkl_?bsrsm
mkl_?diamv
mkl_?skymv
mkl_?diasv
mkl_?skysv
mkl_?diamm
mkl_?skymm
mkl_?diasm
mkl_?skysm
mkl_?dnscsr
mkl_?csrcoo
mkl_?csrbsr
mkl_?csrcsc
mkl_?csrdia
mkl_?csrsky
mkl_?csradd
mkl_?csrmultcsr
mkl_?csrmultd
Naming Conventions in Inspector-Executor Sparse BLAS Routines
Sparse Matrix Storage Formats for Inspector-executor Sparse BLAS Routines
Supported Inspector-executor Sparse BLAS Operations
Two-stage Algorithm in Inspector-Executor Sparse BLAS Routines
Matrix Manipulation Routines
Inspector-Executor Sparse BLAS Analysis Routines
Inspector-Executor Sparse BLAS Execution Routines
mkl_sparse_?_create_csr
mkl_sparse_?_create_csc
mkl_sparse_?_create_coo
mkl_sparse_?_create_bsr
mkl_sparse_copy
mkl_sparse_destroy
mkl_sparse_convert_csr
mkl_sparse_convert_bsr
mkl_sparse_?_export_csr
mkl_sparse_?_export_csc
mkl_sparse_?_export_bsr
mkl_sparse_?_set_value
mkl_sparse_?_update_values
mkl_sparse_order
mkl_sparse_?_lu_smoother
mkl_sparse_?_mv
mkl_sparse_?_trsv
mkl_sparse_?_mm
mkl_sparse_?_trsm
mkl_sparse_?_add
mkl_sparse_spmm
mkl_sparse_?_spmmd
mkl_sparse_sp2m
mkl_sparse_?_sp2md
mkl_sparse_sypr
mkl_sparse_?_syprd
mkl_sparse_?_symgs
mkl_sparse_?_symgs_mv
mkl_sparse_syrk
mkl_sparse_?_syrkd
mkl_sparse_?_dotmv
mkl_sparse_?_sorv
?axpy_batch
?axpy_batch_strided
?axpby
?gem2vu
?gem2vc
?gemmt
?gemm3m
?gemm_batch
?gemm_batch_strided
?gemm3m_batch_strided
?gemm3m_batch
?trsm_batch
?trsm_batch_strided
mkl_?imatcopy
mkl_?imatcopy_batch
mkl_?imatcopy_batch_strided
mkl_?omatadd_batch_strided
mkl_?omatcopy
mkl_?omatcopy_batch
mkl_?omatcopy_batch_strided
mkl_?omatcopy2
mkl_?omatadd
?gemm_pack_get_size, gemm_*_pack_get_size
?gemm_pack
gemm_*_pack
?gemm_compute
gemm_*_compute
?gemm_free
gemm_*
?gemv_batch_strided
?gemv_batch
?dgmm_batch_strided
?dgmm_batch
mkl_jit_create_?gemm
mkl_jit_get_?gemm_ptr
mkl_jit_destroy
Naming Conventions for LAPACK Routines
Fortran 95 Interface Conventions for LAPACK Routines
Matrix Storage Schemes for LAPACK Routines
Mathematical Notation for LAPACK Routines
Error Analysis
LAPACK Linear Equation Routines
LAPACK Least Squares and Eigenvalue Problem Routines
LAPACK Auxiliary Routines
LAPACK Utility Functions and Routines
LAPACK Test Functions and Routines
Additional LAPACK Routines (Included for Compatibility with Netlib LAPACK)
Matrix Factorization: LAPACK Computational Routines
Solving Systems of Linear Equations: LAPACK Computational Routines
Estimating the Condition Number: LAPACK Computational Routines
Refining the Solution and Estimating Its Error: LAPACK Computational Routines
Matrix Inversion: LAPACK Computational Routines
Matrix Equilibration: LAPACK Computational Routines
?getrf
?getrf_batch
?getrf_batch_strided
mkl_?getrfnp
?getrfnp_batch_strided
mkl_?getrfnpi
?getrf2
?getri_oop_batch
?getri_oop_batch_strided
?gbtrf
?gttrf
?dttrfb
?potrf
?potrf2
?pstrf
?pftrf
?pptrf
?pbtrf
?pttrf
?sytrf
?sytrf_aa
?sytrf_rook
?sytrf_rk
?hetrf
?hetrf_aa
?hetrf_rook
?hetrf_rk
?sptrf
?hptrf
mkl_?spffrt2, mkl_?spffrtx
Orthogonal Factorizations: LAPACK Computational Routines
Singular Value Decomposition: LAPACK Computational Routines
Symmetric Eigenvalue Problems: LAPACK Computational Routines
Generalized Symmetric-Definite Eigenvalue Problems: LAPACK Computational Routines
Nonsymmetric Eigenvalue Problems: LAPACK Computational Routines
Generalized Nonsymmetric Eigenvalue Problems: LAPACK Computational Routines
Generalized Singular Value Decomposition: LAPACK Computational Routines
Cosine-Sine Decomposition: LAPACK Computational Routines
Linear Least Squares (LLS) Problems: LAPACK Driver Routines
Generalized Linear Least Squares (LLS) Problems: LAPACK Driver Routines
Symmetric Eigenvalue Problems: LAPACK Driver Routines
Nonsymmetric Eigenvalue Problems: LAPACK Driver Routines
Singular Value Decomposition: LAPACK Driver Routines
Cosine-Sine Decomposition: LAPACK Driver Routines
Generalized Symmetric Definite Eigenvalue Problems: LAPACK Driver Routines
Generalized Nonsymmetric Eigenvalue Problems: LAPACK Driver Routines
?lacgv
?lacrm
?lacrt
?laesy
?rot
?spmv
?spr
?syconv
?symv
?syr
i?max1
?sum1
?gbtf2
?gebd2
?gehd2
?gelq2
?gelqt3
?geql2
?geqr2
?geqr2p
?geqrt2
?geqrt3
?gerq2
?gesc2
?getc2
?getf2
?gtts2
?isnan
?laisnan
?labrd
?lacn2
?lacon
?lacpy
?ladiv
?lae2
?laebz
?laed0
?laed1
?laed2
?laed3
?laed4
?laed5
?laed6
?laed7
?laed8
?laed9
?laeda
?laein
?laev2
?laexc
?lag2
?lags2
?lagtf
?lagtm
?lagts
?lagv2
?lahqr
?lahrd
?lahr2
?laic1
?lakf2
?laln2
?lals0
?lalsa
?lalsd
?lamrg
?lamswlq
?lamtsqr
?laneg
?langb
?lange
?langt
?lanhs
?lansb
?lanhb
?lansp
?lanhp
?lanst/?lanht
?lansy
?lanhe
?lantb
?lantp
?lantr
?lanv2
?lapll
?lapmr
?lapmt
?lapy2
?lapy3
?laqgb
?laqge
?laqhb
?laqp2
?laqps
?laqr0
?laqr1
?laqr2
?laqr3
?laqr4
?laqr5
?laqsb
?laqsp
?laqsy
?laqtr
?laqz0
?lar1v
?lar2v
?laran
?larf
?larfb
?larfg
?larfgp
?larft
?larfx
?larfy
?large
?largv
?larnd
?larnv
?laror
?larot
?larra
?larrb
?larrc
?larrd
?larre
?larrf
?larrj
?larrk
?larrr
?larrv
?lartg
?lartgp
?lartgs
?lartv
?laruv
?larz
?larzb
?larzt
?las2
?lascl
?lasd0
?lasd1
?lasd2
?lasd3
?lasd4
?lasd5
?lasd6
?lasd7
?lasd8
?lasd9
?lasda
?lasdq
?lasdt
?laset
?lasq1
?lasq2
?lasq3
?lasq4
?lasq5
?lasq6
?lasr
?lasrt
?lassq
?lasv2
?laswlq
?laswp
?lasy2
?lasyf
?lasyf_aa
?lasyf_rook
?lahef
?lahef_aa
?lahef_rook
?latbs
?latm1
?latm2
?latm3
?latm5
?latm6
?latme
?latmr
?latdf
?latps
?latrd
?latrs
?latrz
?latsqr
?lauu2
?lauum
?orbdb1/?unbdb1
?orbdb2/?unbdb2
?orbdb3/?unbdb3
?orbdb4/?unbdb4
?orbdb5/?unbdb5
?orbdb6/?unbdb6
?org2l/?ung2l
?org2r/?ung2r
?orgl2/?ungl2
?orgr2/?ungr2
?orm2l/?unm2l
?orm2r/?unm2r
?orml2/?unml2
?ormr2/?unmr2
?ormr3/?unmr3
?pbtf2
?potf2
?ptts2
?rscl
?syswapr
?heswapr
?syswapr1
?sygs2/?hegs2
?sytd2/?hetd2
?sytf2
?sytf2_rook
?hetf2
?hetf2_rook
?tgex2
?tgsy2
?trti2
clag2z
dlag2s
slag2d
zlag2c
?larfp
ila?lc
ila?lr
?gsvj0
?gsvj1
?sfrk
?hfrk
?tfsm
?lansf
?lanhf
?tfttp
?tfttr
?tplqt2
?tpqrt2
?tprfb
?tpttf
?tpttr
?trttf
?trttp
?pstf2
dlat2s
zlat2c
?lacp2
?la_gbamv
?la_gbrcond
?la_gbrcond_c
?la_gbrcond_x
?la_gbrfsx_extended
?la_gbrpvgrw
?la_geamv
?la_gercond
?la_gercond_c
?la_gercond_x
?la_gerfsx_extended
?la_heamv
?la_hercond_c
?la_hercond_x
?la_herfsx_extended
?la_herpvgrw
?la_lin_berr
?la_porcond
?la_porcond_c
?la_porcond_x
?la_porfsx_extended
?la_porpvgrw
?laqhe
?laqhp
?larcm
?la_gerpvgrw
?larscl2
?lascl2
?la_syamv
?la_syrcond
?la_syrcond_c
?la_syrcond_x
?la_syrfsx_extended
?la_syrpvgrw
?la_wwaddw
mkl_?tppack
mkl_?tpunpack
Additional LAPACK Routines
Systems of Linear Equations: ScaLAPACK Computational Routines
Matrix Factorization: ScaLAPACK Computational Routines
Solving Systems of Linear Equations: ScaLAPACK Computational Routines
Estimating the Condition Number: ScaLAPACK Computational Routines
Refining the Solution and Estimating Its Error: ScaLAPACK Computational Routines
Matrix Inversion: ScaLAPACK Computational Routines
Matrix Equilibration: ScaLAPACK Computational Routines
Orthogonal Factorizations: ScaLAPACK Computational Routines
Symmetric Eigenvalue Problems: ScaLAPACK Computational Routines
Nonsymmetric Eigenvalue Problems: ScaLAPACK Computational Routines
Singular Value Decomposition: ScaLAPACK Driver Routines
Generalized Symmetric-Definite Eigenvalue Problems: ScaLAPACK Computational Routines
b?laapp
b?laexc
b?trexc
p?lacgv
p?max1
pilaver
pmpcol
pmpim2
?combamax1
p?sum1
p?dbtrsv
p?dttrsv
p?gebal
p?gebd2
p?gehd2
p?gelq2
p?geql2
p?geqr2
p?gerq2
p?getf2
p?labrd
p?lacon
p?laconsb
p?lacp2
p?lacp3
p?lacpy
p?laevswp
p?lahrd
p?laiect
p?lamve
p?lange
p?lanhs
p?lansy, p?lanhe
p?lantr
p?lapiv
p?lapv2
p?laqge
p?laqr0
p?laqr1
p?laqr2
p?laqr3
p?laqr4
p?laqr5
p?laqsy
p?lared1d
p?lared2d
p?larf
p?larfb
p?larfc
p?larfg
p?larft
p?larz
p?larzb
p?larzc
p?larzt
p?lascl
p?lase2
p?laset
p?lasmsub
p?lasrt
p?lassq
p?laswp
p?latra
p?latrd
p?latrs
p?latrz
p?lauu2
p?lauum
p?lawil
p?org2l/p?ung2l
p?org2r/p?ung2r
p?orgl2/p?ungl2
p?orgr2/p?ungr2
p?orm2l/p?unm2l
p?orm2r/p?unm2r
p?orml2/p?unml2
p?ormr2/p?unmr2
p?pbtrsv
p?pttrsv
p?potf2
p?rot
p?rscl
p?sygs2/p?hegs2
p?sytd2/p?hetd2
p?trord
p?trsen
p?trti2
?lahqr2
?lamsh
?lapst
?laqr6
?lar1va
?laref
?larrb2
?larrd2
?larre2
?larre2a
?larrf2
?larrv2
?lasorte
?lasrt2
?stegr2
?stegr2a
?stegr2b
?stein2
?dbtf2
?dbtrf
?dttrf
?dttrsv
?pttrsv
?steqr2
?trmvt
pilaenv
pilaenvx
pjlaenv
Additional ScaLAPACK Routines
oneMKL PARDISO - Parallel Direct Sparse Solver Interface
Parallel Direct Sparse Solver for Clusters Interface
Direct Sparse Solver (DSS) Interface Routines
Iterative Sparse Solvers based on Reverse Communication Interface (RCI ISS)
Preconditioners based on Incomplete LU Factorization Technique
Sparse Matrix Checker Routines
pardiso
pardisoinit
pardiso_64
mkl_pardiso_pivot
pardiso_getdiag
pardiso_export
pardiso_handle_store
pardiso_handle_restore
pardiso_handle_delete
pardiso_handle_store_64
pardiso_handle_restore_64
pardiso_handle_delete_64
oneMKL PARDISO Parameters in Tabular Form
pardiso iparm Parameter
PARDISO_DATA_TYPE
vslNewStream
vslNewStreamEx
vsliNewAbstractStream
vsldNewAbstractStream
vslsNewAbstractStream
vslDeleteStream
vslCopyStream
vslCopyStreamState
vslSaveStreamF
vslLoadStreamF
vslSaveStreamM
vslLoadStreamM
vslGetStreamSize
vslLeapfrogStream
vslSkipAheadStream
vslSkipAheadStreamEx
vslGetStreamStateBrng
vslGetNumRegBrngs
Convolution and Correlation Naming Conventions
Convolution and Correlation Data Types
Convolution and Correlation Parameters
Convolution and Correlation Task Status and Error Reporting
Convolution and Correlation Task Constructors
Convolution and Correlation Task Editors
Task Execution Routines
Convolution and Correlation Task Destructors
Convolution and Correlation Task Copiers
Convolution and Correlation Usage Examples
Convolution and Correlation Mathematical Notation and Definitions
Convolution and Correlation Data Allocation
Summary Statistics Naming Conventions
Summary Statistics Data Types
Summary Statistics Parameters
Summary Statistics Task Status and Error Reporting
Summary Statistics Task Constructors
Summary Statistics Task Editors
Summary Statistics Task Computation Routines
Summary Statistics Task Destructor
Summary Statistics Usage Examples
Summary Statistics Mathematical Notation and Definitions
DFTI_PRECISION
DFTI_FORWARD_DOMAIN
DFTI_DIMENSION, DFTI_LENGTHS
DFTI_PLACEMENT
DFTI_FORWARD_SCALE, DFTI_BACKWARD_SCALE
DFTI_NUMBER_OF_USER_THREADS
DFTI_THREAD_LIMIT
DFTI_INPUT_STRIDES, DFTI_OUTPUT_STRIDES
DFTI_NUMBER_OF_TRANSFORMS
DFTI_INPUT_DISTANCE, DFTI_OUTPUT_DISTANCE
DFTI_COMPLEX_STORAGE, DFTI_REAL_STORAGE, DFTI_CONJUGATE_EVEN_STORAGE
DFTI_PACKED_FORMAT
DFTI_WORKSPACE
DFTI_COMMIT_STATUS
DFTI_ORDERING
Data Fitting Function Naming Conventions
Data Fitting Function Data Types
Mathematical Conventions for Data Fitting Functions
Data Fitting Usage Model
Data Fitting Usage Examples
Data Fitting Function Task Status and Error Reporting
Data Fitting Task Creation and Initialization Routines
Task Configuration Routines
Data Fitting Computational Routines
Data Fitting Task Destructors
DSS Symmetric Matrix Storage
DSS Nonsymmetric Matrix Storage
DSS Structurally Symmetric Matrix Storage
DSS Distributed Symmetric Matrix Storage
Sparse BLAS CSR Matrix Storage Format
Sparse BLAS CSC Matrix Storage Format
Sparse BLAS Coordinate Matrix Storage Format
Sparse BLAS Diagonal Matrix Storage Format
Sparse BLAS Skyline Matrix Storage Format
Sparse BLAS BSR Matrix Storage Format
Visible to Intel only — GUID: GUID-901B4568-D14F-4ABB-ACFD-39DBE23E5E9B
Direct Method
For solvers that use the direct method, the basic technique employed in finding the solution of the system Ax = b is to first factor A into triangular matrices. That is, find a lower triangular matrix L and an upper triangular matrix U, such that A = LU. Having obtained such a factorization (usually referred to as an LU decomposition or LU factorization), the solution to the original problem can be rewritten as follows.
- Ax = b
-
 Equation
Equation
- LUx = b
-
Equation
- L(Ux) = b
This leads to the following two-step process for finding the solution to the original system of equations:
Solve the systems of equations Ly = b.
Solve the system Ux = y.
Solving the systems Ly = b and Ux = y is referred to as a forward solve and a backward solve, respectively.
If a symmetric matrix A is also positive definite, it can be shown that A can be factored as LLT where L is a lower triangular matrix. Similarly, a Hermitian matrix, A, that is positive definite can be factored as A = LLH. For both symmetric and Hermitian matrices, a factorization of this form is called a Cholesky factorization.
In a Cholesky factorization, the matrix U in an LU decomposition is either LT or LH. Consequently, a solver can increase its efficiency by only storing L, and one-half of A, and not computing U. Therefore, users who can express their application as the solution of a system of positive definite equations will gain a significant performance improvement over using a general representation.
For matrices that are symmetric (or Hermitian) but not positive definite, there are still some significant efficiencies to be had. It can be shown that if A is symmetric but not positive definite, then A can be factored as A = LDLT, where D is a diagonal matrix and L is a lower unit triangular matrix. Similarly, if A is Hermitian, it can be factored as A = LDLH. In either case, we again only need to store L, D, and half of A and we need not compute U. However, the backward solve phases must be amended to solving LTx = D-1y rather than LTx = y.
Fill-In and Reordering of Sparse Matrices
Two important concepts associated with the solution of sparse systems of equations are fill-in and reordering. The following example illustrates these concepts.
Consider the system of linear equation Ax = b, where A is a symmetric positive definite sparse matrix, and A and b are defined by the following:
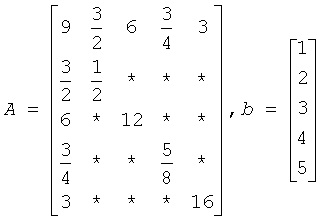
A star (*) is used to represent zeros and to emphasize the sparsity of A. The Cholesky factorization of A is: A = LLT, where L is the following:
Notice that even though the matrix A is relatively sparse, the lower triangular matrix L has no zeros below the diagonal. If we computed L and then used it for the forward and backward solve phase, we would do as much computation as if A had been dense.
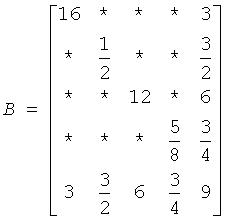
The situation of L having non-zeros in places where A has zeros is referred to as fill-in. Computationally, it would be more efficient if a solver could exploit the non-zero structure of A in such a way as to reduce the fill-in when computing L. By doing this, the solver would only need to compute the non-zero entries in L. Toward this end, consider permuting the rows and columns of A. As described in Matrix Fundamentals, the permutations of the rows of A can be represented as a permutation matrix, P. The result of permuting the rows is the product of P and A. Suppose, in the above example, we swap the first and fifth row of A, then swap the first and fifth columns of A, and call the resulting matrix B. Mathematically, we can express the process of permuting the rows and columns of A to get B as B = PAPT. After permuting the rows and columns of A, we see that B is given by the following:
Since B is obtained from A by simply switching rows and columns, the numbers of non-zero entries in A and B are the same. However, when we find the Cholesky factorization, B = LLT, we see the following:
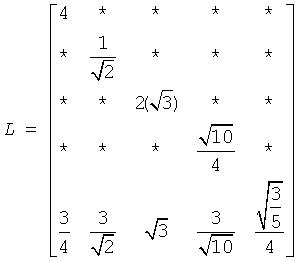
The fill-in associated with B is much smaller than the fill-in associated with A. Consequently, the storage and computation time needed to factor B is much smaller than to factor A. Based on this, we see that an efficient sparse solver needs to find permutation P of the matrix A, which minimizes the fill-in for factoring B = PAPT, and then use the factorization of B to solve the original system of equations.
Although the above example is based on a symmetric positive definite matrix and a Cholesky decomposition, the same approach works for a general LU decomposition. Specifically, let P be a permutation matrix, B = PAPT and suppose that B can be factored as B = LU. Then
Ax = b
PA(P-1P)x = Pb
PA(PTP)x = Pb
(PAPT)(Px) = Pb
B(Px) = Pb
LU(Px) = Pb
It follows that if we obtain an LU factorization for B, we can solve the original system of equations by a three step process:
Solve Ly = Pb.
Solve Uz = y.
Set x = PTz.
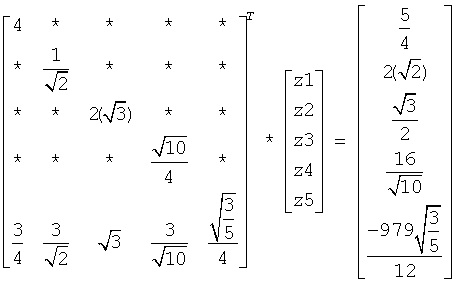
If we apply this three-step process to the current example, we first need to perform the forward solve of the systems of equation Ly = Pb:
This gives:
The second step is to perform the backward solve, Uz = y. Or, in this case, since a Cholesky factorization is used, LTz = y.
This gives

The third and final step is to set x = PTz. This gives

Parent topic: Sparse Linear Systems