Visible to Intel only — GUID: GUID-B2A96064-81E1-41DE-A900-780466DD8BCB
Introduction
Install and Launch Intel® Advisor
Set Up Project
Analyze Vectorization Perspective
Analyze CPU Roofline
Model Threading Designs
Model Offloading to a GPU
Analyze GPU Roofline
Design and Analyze Flow Graphs
Minimize Analysis Overhead
Analyze MPI Applications
Manage Results
Command Line Interface
Troubleshooting
Reference
Appendix
Notices and Disclaimers
Annotation Report, Clear Description of Storage Row
Annotation Report, Disable Observations in Region Row
Annotation Report, Pause Collection Row
Annotation Report, Inductive Expression Row
Annotation Report, Lock Row
Annotation Report, Observe Uses Row
Annotation Report, Reduction Row
Annotation Report, Re-enable Observations at End of Region Row
Annotation Report, Resume Collection Row
Annotation Report, Site Row
Annotation Report, Task Row
Annotation Report, User Memory Allocator Use Row
Annotation Report, User Memory Deallocator Use Row
Intel® oneAPI Threading Building Blocks (oneTBB) Mutexes
Intel® oneAPI Threading Building Blocks (oneTBB) Simple Mutex - Example
Test the Intel® oneAPI Threading Building Blocks (oneTBB) Synchronization Code
Parallelize Functions - Intel® oneAPI Threading Building Blocks (oneTBB) Tasks
Parallelize Data - Intel® oneAPI Threading Building Blocks (oneTBB) Counted Loops
Parallelize Data - Intel® oneAPI Threading Building Blocks (oneTBB) Loops with Complex Iteration Control
Add OpenMP Code to Synchronize the Shared Resources
OpenMP Critical Sections
Basic OpenMP Atomic Operations
Advanced OpenMP Atomic Operations
OpenMP Reduction Operations
OpenMP Locks
Test the OpenMP Synchronization Code
Parallelize Functions - OpenMP Tasks
Parallelize Data - OpenMP Counted Loops
Parallelize Data - OpenMP Loops with Complex Iteration Control
Where to Find the Flow Graph Analyzer
Launching the Flow Graph Analyzer
Flow Graph Analyzer GUI Overview
Flow Graph Analyzer Workflows
Designer Workflow
Generating C++ Stubs
Preferences
Scalability Analysis
Collecting Traces from Applications
Nested Parallelism in Flow Graph Analyzer
Analyzer Workflow
Experimental Support for OpenMP* Applications
Sample Trace Files
Additional Resources
accuracy
append
app-working-dir
assume-dependencies
assume-hide-taxes
assume-ndim-dependency
assume-single-data-transfer
auto-finalize
batching
benchmarks-sync
bottom-up
cache-binaries
cache-binaries-mode
cache-config
cache-simulation
cache-sources
cachesim
cachesim-associativity
cachesim-cacheline-size
cachesim-mode
cachesim-sampling-factor
cachesim-sets
check-profitability
clear
config
count-logical-instructions
count-memory-instructions
count-memory-objects-accesses
count-mov-instructions
count-send-latency
cpu-scale-factor
csv-delimiter
custom-config
data-limit
data-reuse-analysis
data-transfer
data-transfer-histogram
data-transfer-page-size
data-type
delete-tripcounts
disable-fp64-math-optimization
display-callstack
dry-run
duration
dynamic
enable-cache-simulation
enable-data-transfer-analysis
enable-task-chunking
enforce-baseline-decomposition
enforce-fallback
enforce-offloads
estimate-max-speedup
evaluate-min-speedup
exclude-files
executable-of-interest
exp-dir
filter
filter-by-scope
filter-reductions
flop
force-32bit-arithmetics
force-64bit-arithmetics
format
gpu
gpu-carm
gpu-kernel-of-interest
gpu-sampling-interval
hide-data-transfer-tax
ignore
ignore-app-mismatch
ignore-checksums
instance-of-interest
integrated
interval
limit
loop-call-count-limit
loop-filter-threshold
loops
mark-up
mark-up-list
memory-level
memory-operation-type
mix
mkl-user-mode
model-baseline-gpu
model-children
model-extended-math
model-system-calls
module-filter
module-filter-mode
mpi-rank
mrte-mode
ndim-depth-limit
option-file
overlap-taxes
pack
profile-gpu
profile-intel-perf-libs
profile-jit
profile-python
profile-stripped-binaries
project-dir
quiet
recalculate-time
record-mem-allocations
record-stack-frame
reduce-lock-contention
reduce-lock-overhead
reduce-site-overhead
reduce-task-overhead
refinalize-survey
remove
report-output
report-template
result-dir
resume-after
return-app-exitcode
search-dir
search-n-dim
select
set-dependency
set-parallel
set-parameter
show-all-columns
show-all-rows
show-functions
show-loops
show-not-executed
show-report
small-node-filter
sort-asc
sort-desc
spill-analysis
stack-access-granularity
stack-stitching
stack-unwind-limit
stacks
stackwalk-mode
start-paused
static-instruction-mix
strategy
support-multi-isa-binaries
target-device
target-gpu
target-pid
target-process
target-system
threading-model
threads
top-down
trace-mode
trace-mpi
track-memory-objects
track-stack-accesses
track-stack-variables
trip-counts
verbose
with-stack
Error Message: Application Sets Its Own Handler for Signal
Error Message: Cannot Collect GPU Hardware Metrics for the Selected GPU Adapter
Error Message: Memory Model Cache Hierarchy Incompatible
Error Message: No Annotations Found
Error Message: No Data Is Collected
Error Message: Stack Size Is Too Small
Error Message: Undefined Linker References to dlopen or dlsym
Problem: Broken Call Tree
Problem: Code Region is not Marked Up
Problem: Debug Information Not Available
Problem: No Data
Problem: Source Not Available
Problem: Stack in the Top-Down Tree Window Is Incorrect
Problem: Survey Tool does not Display Survey Report
Problem: Unexpected C/C++ Compilation Errors After Adding Annotations
Problem: Unexpected Unmatched Annotations in the Dependencies Report
Warning: Analysis of Debug Build
Warning: Analysis of Release Build
Dangling Lock
Data Communication
Data Communication, Child Task
Inconsistent Lock Use
Lock Hierarchy Violation
Memory Reuse
Memory Reuse, Child Task
Memory Watch
Missing End Site
Missing End Task
Missing Start Site
Missing Start Task
No Tasks in Parallel Site
One Task Instance in Parallel Site
Orphaned Task
Parallel Site Information
Thread Information
Unhandled Application Exception
Dialog Box: Corresponding Command Line
Dialog Box: Create a Project
Dialog Box: Create a Result Snapshot
Dialog Box: Options - Assembly
Editor Tab
Dialog Box: Options - General
Dialog Box: Options - Result Location
Dialog Box: Project Properties - Analysis Target
Dialog Box: Project Properties - Binary/Symbol Search
Dialog Box: Project Properties - Source Search
Pane: Advanced View
Pane: Analysis Workflow
Pane: Roofline Chart
Pane: GPU Roofline Chart
Project Navigator Pane
Toolbar: Intel Advisor
Annotation Report
Window: Dependencies Source
Window: GPU Roofline Regions
Window: GPU Roofline Insights Summary
Window: Memory Access Patterns Source
Window: Offload Modeling Summary
Window: Offload Modeling Report - Accelerated Regions
Window: Perspective Selector
Window: Refinement Reports
Window: Suitability Report
Window: Suitability Source
Window: Survey Report
Window: Survey Source
Window: Threading Summary
Window: Vectorization Summary
Visible to Intel only — GUID: GUID-B2A96064-81E1-41DE-A900-780466DD8BCB
OpenMP* Constructs in the Graph Canvas
To map OpenMP* parallel regions and task constructs to a graph, run the fgt2xml converter with the --omp_experimental flag. In such graph, nodes represent parallel regions and tasks, and edges represent task dependencies
Parallel Regions
All OpenMP-related parallelism is contained within OpenMP parallel regions. In the Flow Graph Analyzer, a parallel region is mapped to a subgraph node in the graph canvas. Inside the subgraph node are at least two nodes:
- A node that represents the start of the parallel region.
- A node that represents the implicit barrier at the end of the region.
For example, for an empty parallel region like the following, the Flow Graph Analyzer creates a subgraph node, such as omp0::n0, in the graph canvas.
#pragma omp parallel
{
}
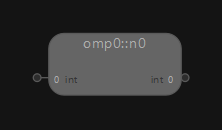
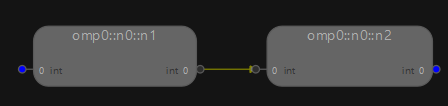
When you double-click the subgraph node, you see the following, where omp0::n0::n1 is the start of the parallel region and omp0::n0::n2 is the implicit barrier at the end of the node.
OpenMP* Tasks
An OpenMP* task is a block of code contained in a parallel region that can be executed simultaneously with other tasks in the same region. In the Flow Graph Analyzer, an OpenMP task is mapped to a generic node. For example, in the code below, there are two tasks: one prints hello and the other prints world. The order in which these tasks execute is not specified, so they can execute in any order. However, the two tasks always start after the enclosing parallel region begins, and they complete before the enclosing parallel region ends.
#pragma omp parallel
{
#pragma omp task
{ printf("hello "); }
#pragma omp task
{ printf("world "); }
}
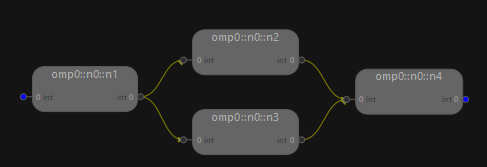
When you visualize this program in the Flow Graph Analyzer, it looks like this:
When you double-click this subgraph, you see the following, where omp0::n0::n1 is the start of the parallel region, omp0::n0::n4 is the implicit barrier at the end of the region, omp0::n0::n2 is the "hello" task and omp0::n0::n3 is the "world" task.
OpenMP* Task Dependencies
In the OpenMP* specification, a partial ordering of tasks can be expressed with depend clauses. The task dependence is fulfilled when the predecessor task completes. There are three dependency types supported by the OpenMP API: in, out, and in-out:
- in dependency type: The generated task is a dependent task of all previously generated sibling tasks that reference at least one of the list items in an out or in-out clause.
- out and in-out dependency types: The generated task is a dependent task of all previously generated sibling tasks that reference at least one of the list items in an in, out, or in-out clause.
In the Flow Graph Analyzer, task dependencies are represented by edges between the nodes that represent OpenMP tasks.
It is important to understand what dependencies are visualized in the Flow Graph Analyzer.
The task dependency graph represents the partial order set by the depend clauses for the OpenMP tasks executed by the application. The nodes in the graphs are OpenMP tasks and the edges represent the partial order.
To reduce the complexity of the graph, the Flow Graph Analyzer omits some transitive dependencies. A transitive dependence is a dependency between three tasks, such that if it holds between the first and the second tasks and between the second and the third tasks, it must hold between the first and the third tasks. In the figure below, the node a must execute before the node b in the partial order due to a dependency on the location x as a <x b.
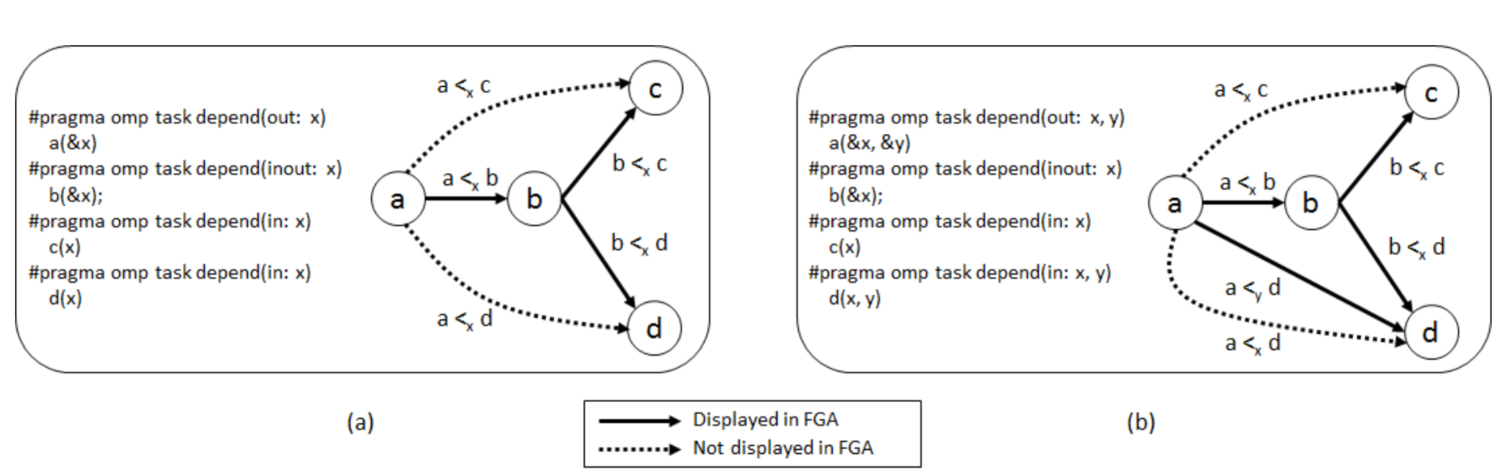
Part (a) of the figure shows an example that only includes dependencies due to a single location x. Because a <x b and b <x d, the Flow Graph Analyzer does not show the transitive edge a <x d.
Part (b) of the figure shows two locations x and y that determine the partial order. There are two potential dependency edges from a to d: a <x d and a <y d. The Flow Graph Analyzer includes an edge from a to d because a is the direct source of y for d, but it excludes a <x d.
NOTE:
If there are parallel edges between two nodes and at least one of them can be omitted due to transitivity, they all can be omitted without changing the partial order. The Flow Graph Analyzer includes edges like a <y d in the graph topology because including edges to satisfy all required data dependencies is the most natural representation.
For example:
#pragma omp parallel
{
std::string s = "";
#prgma omp single
{
#pragma omp task depend( out: s)
{ s = "hello";
printf("%s", s);
}
#pragma omp task depend( out: s )
{ s = "world";
printf("%s",s);
}
}
}
This application, when visualized with the Flow Graph Analyzer, has a single top-level subgraph node representing the OpenMP parallel region.
When you double-click this subgraph, you see the following:

The edge between omp0::n0::n2 and omp0::n0::n3 represents task dependency due to the variable s.
The main components of the Flow Graph Analyzer include the treemap view, the graph-topology canvas, the timeline and concurrency histogram view, and the critical-path report. OpenMP task traces map naturally to these views:
- The treemap view shows the time spent in each OpenMP parallel region, colored according to the average application concurrency during the time it was executing.
- The graph topology canvas shows the partial ordering of the tasks.
- The timeline and concurrency histogram view show the execution of each task on the OpenMP runtime threads and the application concurrency over time.
- The critical report shows the most time-consuming path from each source to each sink in the graph, sorted with the longest critical path at the top.
For more examples, see https://link.springer.com/chapter/10.1007/978-3-319-98521-3_12.
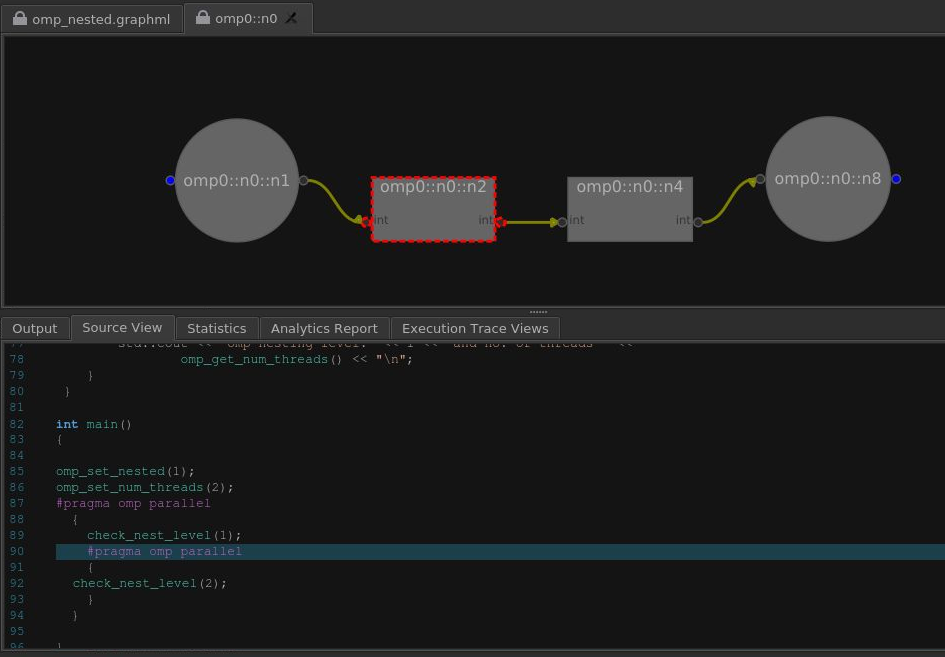
OpenMP* Nodes to Source Code Mapping:
In addition to the graphical view of OpenMP* task dependency graphs, the Flow Graph Analyzer also shows nodes mapping to corresponding source code. To get this information, you must build an OpenMP application with the -g flag.
For example, source code mapping with subgraph nodes in a parallel region looks as follows:
Parent topic: Experimental Support for OpenMP* Applications