Intel® Integrated Performance Primitives (Intel® IPP) Developer Guide and Reference
A newer version of this document is available. Customers should click here to go to the newest version.
Object Detection Using Haar-like Features
The object detector described in [ Viola01] and [ Lein02] is based on Haar classifiers. Each classifier uses k rectangular areas (Haar features) to make decision if the region of the image looks like the predefined image or not. Figure “Types of Haar Features” shows different types of Haar features.
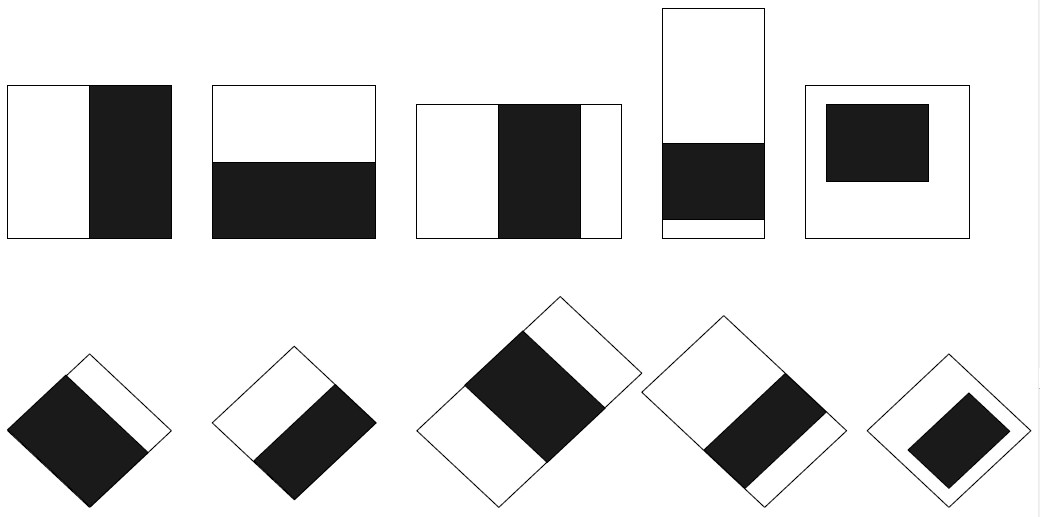
In the Intel IPP Haar features are represented using IppRect structure. Figure “Representing Haar Features” shows how it can be done for common and tilted features.

When the classifier Kt is applied to the pixel (i, j) of the image A, it yields the value val1(t) if

and val2(t) otherwise.
Here wl is a feature weight, norm(i, j) is the norm factor (generally the standard deviation on the rectangle containing all features), threshold(t), val1(t) and val2(t) are parameters of the classifier. For fast computation the integral representation of an image is used. Haar classifiers are organized in sequences called stages (classification stages). The stage value is the sum of its classifier values. During feature detecting stages are consequently applied to the region of the image until the stage value becomes less than the threshold value or all stages are passed.
- HaarClassifierGetSize
Computes the size of the structure for standard Haar classifiers. - HaarClassifierInit
Initializes the structure for standard Haar classifiers. - GetHaarClassifierSize
Returns the size of the Haar classifier. - TiltedHaarClassifierInit
Initializes the structure for tilted Haar classifiers. - TiltHaarFeatures
Modifies a Haar classifier by tilting specified features. - ApplyHaarClassifier
Applies a Haar classifier to an image. - ApplyMixedHaarClassifier
Applies a mixed Haar classifier to an image.