Visible to Intel only — GUID: GUID-6FD84556-4219-4A35-8C54-D09555E36422
basic_statistics_dense_batch.cpp
basic_statistics_dense_online.cpp
column_accessor_homogen.cpp
cor_dense_batch.cpp
cor_dense_online.cpp
cov_dense_batch.cpp
cov_dense_biased_batch.cpp
cov_dense_biased_online.cpp
cov_dense_online.cpp
csr_accessor.cpp
csr_table.cpp
dbscan_brute_force_batch.cpp
df_cls_hist_batch.cpp
df_cls_hist_batch_random.cpp
df_cls_traverse_model.cpp
df_reg_hist_batch.cpp
df_reg_hist_batch_random.cpp
df_reg_traverse_model.cpp
heterogen_table.cpp
homogen_table.cpp
kmeans_init_dense.cpp
kmeans_lloyd_dense_batch.cpp
knn_cls_brute_force_dense_batch.cpp
knn_reg_brute_force_dense_batch.cpp
knn_search_brute_force_dense_batch.cpp
linear_kernel_dense_batch.cpp
linear_regression_dense_batch.cpp
linear_regression_dense_online.cpp
logistic_regression_dense_batch.cpp
pca_cor_dense_batch.cpp
pca_cor_dense_online.cpp
pca_cov_dense_batch.cpp
pca_cov_dense_online.cpp
pca_precomputed_cor_dense_batch.cpp
pca_precomputed_cov_dense_batch.cpp
pca_svd_dense_batch.cpp
rbf_kernel_dense_batch.cpp
svm_two_class_thunder_dense_batch.cpp
basic_statistics_dense_batch.cpp
basic_statistics_dense_online.cpp
column_accessor_homogen.cpp
connected_components_batch.cpp
cor_dense_batch.cpp
cor_dense_online.cpp
cov_dense_batch.cpp
cov_dense_biased_batch.cpp
cov_dense_biased_online.cpp
cov_dense_online.cpp
csr_accessor.cpp
csr_table.cpp
dbscan_brute_force_batch.cpp
df_cls_dense_batch.cpp
df_reg_dense_batch.cpp
directed_graph.cpp
graph_service_functions.cpp
heterogen_table.cpp
homogen_table.cpp
jaccard_batch.cpp
jaccard_batch_app.cpp
kmeans_init_dense.cpp
kmeans_lloyd_dense_batch.cpp
knn_cls_brute_force_dense_batch.cpp
knn_cls_kd_tree_dense_batch.cpp
knn_search_brute_force_dense_batch.cpp
linear_kernel_dense_batch.cpp
linear_regression_dense_batch.cpp
linear_regression_dense_online.cpp
logloss_dense_batch.cpp
louvain_batch.cpp
pca_cor_dense_batch.cpp
pca_cor_dense_online.cpp
pca_cov_dense_batch.cpp
pca_cov_dense_online.cpp
pca_precomputed_dense_batch.cpp
pca_svd_dense_batch.cpp
pca_svd_dense_online.cpp
polynomial_kernel_dense_batch.cpp
rbf_kernel_dense_batch.cpp
shortest_paths_batch.cpp
sigmoid_kernel_dense_batch.cpp
subgraph_isomorphism_batch.cpp
svm_multi_class_thunder_csr_batch.cpp
svm_multi_class_thunder_dense_batch.cpp
svm_nu_cls_thunder_csr_batch.cpp
svm_nu_cls_thunder_dense_batch.cpp
svm_nu_reg_thunder_csr_batch.cpp
svm_nu_reg_thunder_dense_batch.cpp
svm_reg_thunder_csr_batch.cpp
svm_reg_thunder_dense_batch.cpp
svm_two_class_smo_csr_batch.cpp
svm_two_class_smo_dense_batch.cpp
svm_two_class_thunder_csr_batch.cpp
svm_two_class_thunder_dense_batch.cpp
triangle_counting_batch.cpp
K-Means Clustering
Density-Based Spatial Clustering of Applications with Noise
Correlation and Variance-Covariance Matrices
Principal Component Analysis
Principal Components Analysis Transform
Singular Value Decomposition
Association Rules
Kernel Functions
Expectation-Maximization
Cholesky Decomposition
QR Decomposition
Outlier Detection
Distance Matrix
Distributions
Engines
Moments of Low Order
Quantile
Quality Metrics
Sorting
Normalization
Optimization Solvers
Decision Forest
Decision Trees
Gradient Boosted Trees
Stump
Linear and Ridge Regressions
LASSO and Elastic Net Regressions
k-Nearest Neighbors (kNN) Classifier
Implicit Alternating Least Squares
Logistic Regression
Naïve Bayes Classifier
Support Vector Machine Classifier
Multi-class Classifier
Boosting
Visible to Intel only — GUID: GUID-6FD84556-4219-4A35-8C54-D09555E36422
Decision Tree
Decision trees partition the feature space into a set of hypercubes, and then fit a simple model in each hypercube. The simple model can be a prediction model, which ignores all predictors and predicts the majority (most frequent) class (or the mean of a dependent variable for regression), also known as 0-R or constant classifier.
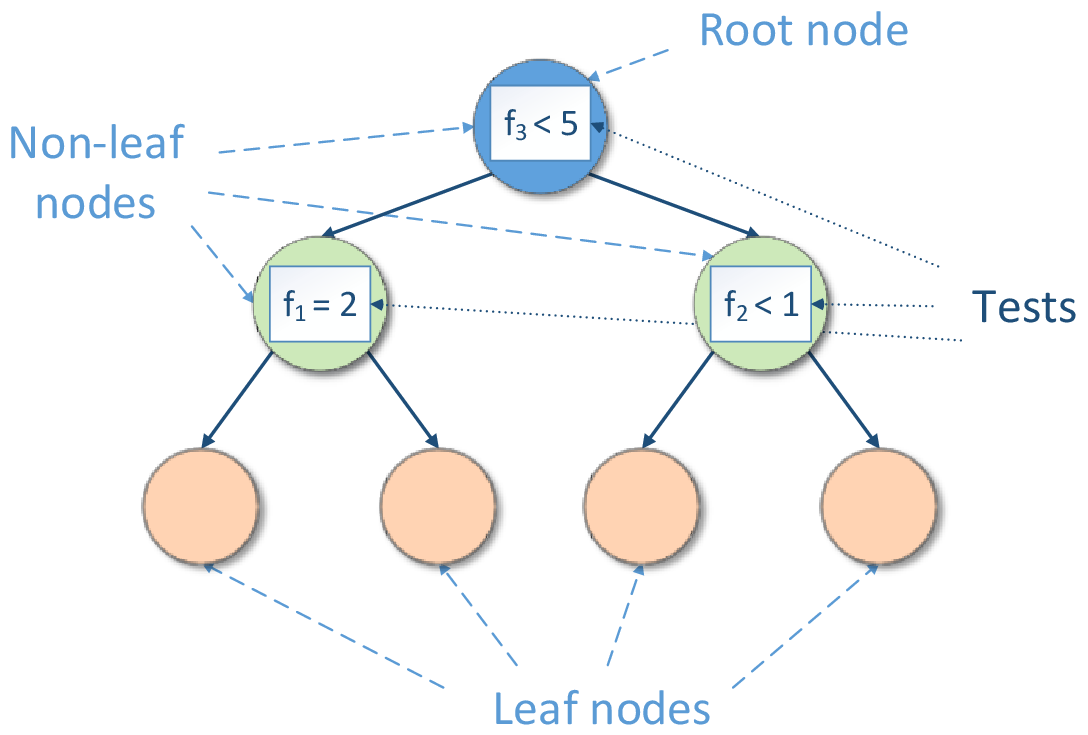
Decision tree induction forms a tree-like graph structure as shown in the figure below, where:
Each internal (non-leaf) node denotes a test on features
Each branch descending from node corresponds to an outcome of the test
Each external node (leaf) denotes the mentioned simple model
Decision Tree Structure
The test is a rule for partitioning of the feature space. The test depends on feature values. Each outcome of the test represents an appropriate hypercube associated with both the test and one of descending branches. If the test is a Boolean expression (for example,  or
or  , where f is a feature and c is a constant fitted during decision tree induction), the inducted decision tree is a binary tree, so its each non-leaf node has exactly two branches (‘true’ and ‘false’) according to the result of the Boolean expression.
, where f is a feature and c is a constant fitted during decision tree induction), the inducted decision tree is a binary tree, so its each non-leaf node has exactly two branches (‘true’ and ‘false’) according to the result of the Boolean expression.
Prediction is performed by starting at the root node of the tree, testing features by the test specified by this node, then moving down the tree branch corresponding to the outcome of the test for the given example. This process is then repeated for the subtree rooted at the new node. The final result is the prediction of the simple model at the leaf node.
Decision trees are often used in popular ensembles (e.g. boosting, bagging or decision forest).
Details
Given n feature vectors  of size p and the vector of responses
of size p and the vector of responses  , the problem is to build a decision tree.
, the problem is to build a decision tree.
Split Criteria
The library provides the decision tree classification algorithm based on split criteria Gini index [Breiman84] and Information gain [Quinlan86], [Mitchell97]. See details in Classification Decision Tree.
The library also provides the decision tree regression algorithm based on the mean-squared error (MSE) [Breiman84]. See details in Regression Decision Tree.
Types of Tests
The library inducts decision trees with the following types of tests:
For continuous features, the test has a form of
 , where
, where  is a feature,
is a feature,  .
.While enumerating all possible tests for each continuous feature, the constant can be any threshold as midway between sequential values for sorted unique values of given feature
that reach the node.For categorical features, the test has a form of
 , where is a feature, .
, where is a feature, .While enumerating all possible tests for each categorical feature, the constant can be any value of given feature
that reach the node.For ordinal features, the test has a form of
 where is a feature, .
where is a feature, .While enumerating all possible tests for each ordinal feature, the constant can be any unique value except for the first one (in the ascending order) of given feature
that reach the node
Post-pruning
Optionally, the decision tree can be post-pruned using given m feature vectors  of size p, a vector of class labels
of size p, a vector of class labels  for classification or a vector of responses for regression. For more details about pruning, see [Quinlan87].
for classification or a vector of responses for regression. For more details about pruning, see [Quinlan87].
Pruned dataset can be some fraction of original training dataset (e.g. randomly chosen 30% of observations), but in this case those observations must be excluded from the training dataset.
Training Stage
The library uses the following algorithmic framework for the training stage.
The decision tree grows recursively from the root node, which corresponds to the entire training dataset. This process takes into account pre-pruning parameters: maximum tree depth and minimum number of observations in the leaf node . For each feature, each possible test is examined to be the best one according to the given split criterion. The best test is used to perform partition of the feature space into a set of hypercubes, and each hypercube represents appropriate part of the training dataset to accomplish the construction of each node at the next level in the decision tree.
After the decision tree is built, it can optionally be pruned by Reduced Error Pruning (REP) [Quinlan87] to avoid overfitting. REP assumes that there is a separate pruning dataset, each observation in which is used to get prediction by the original (unpruned) tree. For every non-leaf subtree, the change in mispredictions is examined over the pruning dataset that would occur if this subtree was replaced by the best possible leaf:

where
 is the number of errors (for classification) and the mean-squared error (MSE) (for regression) for a given subtree
is the number of errors (for classification) and the mean-squared error (MSE) (for regression) for a given subtree is the number of errors (for classification) and the MSE (for regression) for the best possible leaf, which replaces the given subtree.
is the number of errors (for classification) and the MSE (for regression) for the best possible leaf, which replaces the given subtree.
If the new tree gives an equal or fewer mispredictions ( ) and the subtree contains no subtree with the same property, the subtree is replaced by the leaf. The process continues until any further replacements increase mispredictions over the pruning dataset. The final tree is the most accurate subtree of the original tree with respect to the pruning dataset and is the smallest tree with that accuracy.
) and the subtree contains no subtree with the same property, the subtree is replaced by the leaf. The process continues until any further replacements increase mispredictions over the pruning dataset. The final tree is the most accurate subtree of the original tree with respect to the pruning dataset and is the smallest tree with that accuracy.
The training procedure contains the following steps:
Grow the decision tree (subtree):
If all observations contain the same class label (for classification) or same value of dependent variable (for regression), or pre-pruning parameters disallow further decision tree growing, construct a leaf node.
Otherwise
For each feature, sort given feature values and evaluate an appropriate split criterion for every possible test (see Split Criteria and Types of Tests for details).
Construct a node with a test corresponding to the best split criterion value.
Partition observations according to outcomes of the found test and recursively grow a decision subtree for each partition.
Post-prune the decision tree (see Post-pruning for details).
Prediction Stage
The library uses the following algorithmic framework for the prediction stage.
Given the decision tree and vectors  , the problem is to calculate the responses for those vectors.
, the problem is to calculate the responses for those vectors.
To solve the problem for each given vector  , the algorithm examines by tests in split nodes to find the leaf node, which contains the prediction response.
, the algorithm examines by tests in split nodes to find the leaf node, which contains the prediction response.