Visible to Intel only — GUID: GUID-B5CC86EF-42D3-4CF8-BF22-E1719DD0C685
basic_statistics_dense_batch.cpp
basic_statistics_dense_online.cpp
column_accessor_homogen.cpp
cor_dense_batch.cpp
cor_dense_online.cpp
cov_dense_batch.cpp
cov_dense_biased_batch.cpp
cov_dense_biased_online.cpp
cov_dense_online.cpp
csr_accessor.cpp
csr_table.cpp
dbscan_brute_force_batch.cpp
df_cls_hist_batch.cpp
df_cls_hist_batch_random.cpp
df_cls_traverse_model.cpp
df_reg_hist_batch.cpp
df_reg_hist_batch_random.cpp
df_reg_traverse_model.cpp
heterogen_table.cpp
homogen_table.cpp
kmeans_init_dense.cpp
kmeans_lloyd_dense_batch.cpp
knn_cls_brute_force_dense_batch.cpp
knn_reg_brute_force_dense_batch.cpp
knn_search_brute_force_dense_batch.cpp
linear_kernel_dense_batch.cpp
linear_regression_dense_batch.cpp
linear_regression_dense_online.cpp
logistic_regression_dense_batch.cpp
pca_cor_dense_batch.cpp
pca_cor_dense_online.cpp
pca_cov_dense_batch.cpp
pca_cov_dense_online.cpp
pca_precomputed_cor_dense_batch.cpp
pca_precomputed_cov_dense_batch.cpp
pca_svd_dense_batch.cpp
rbf_kernel_dense_batch.cpp
svm_two_class_thunder_dense_batch.cpp
basic_statistics_dense_batch.cpp
basic_statistics_dense_online.cpp
column_accessor_homogen.cpp
connected_components_batch.cpp
cor_dense_batch.cpp
cor_dense_online.cpp
cov_dense_batch.cpp
cov_dense_biased_batch.cpp
cov_dense_biased_online.cpp
cov_dense_online.cpp
csr_accessor.cpp
csr_table.cpp
dbscan_brute_force_batch.cpp
df_cls_dense_batch.cpp
df_reg_dense_batch.cpp
directed_graph.cpp
graph_service_functions.cpp
heterogen_table.cpp
homogen_table.cpp
jaccard_batch.cpp
jaccard_batch_app.cpp
kmeans_init_dense.cpp
kmeans_lloyd_dense_batch.cpp
knn_cls_brute_force_dense_batch.cpp
knn_cls_kd_tree_dense_batch.cpp
knn_search_brute_force_dense_batch.cpp
linear_kernel_dense_batch.cpp
linear_regression_dense_batch.cpp
linear_regression_dense_online.cpp
logloss_dense_batch.cpp
louvain_batch.cpp
pca_cor_dense_batch.cpp
pca_cor_dense_online.cpp
pca_cov_dense_batch.cpp
pca_cov_dense_online.cpp
pca_precomputed_dense_batch.cpp
pca_svd_dense_batch.cpp
pca_svd_dense_online.cpp
polynomial_kernel_dense_batch.cpp
rbf_kernel_dense_batch.cpp
shortest_paths_batch.cpp
sigmoid_kernel_dense_batch.cpp
subgraph_isomorphism_batch.cpp
svm_multi_class_thunder_csr_batch.cpp
svm_multi_class_thunder_dense_batch.cpp
svm_nu_cls_thunder_csr_batch.cpp
svm_nu_cls_thunder_dense_batch.cpp
svm_nu_reg_thunder_csr_batch.cpp
svm_nu_reg_thunder_dense_batch.cpp
svm_reg_thunder_csr_batch.cpp
svm_reg_thunder_dense_batch.cpp
svm_two_class_smo_csr_batch.cpp
svm_two_class_smo_dense_batch.cpp
svm_two_class_thunder_csr_batch.cpp
svm_two_class_thunder_dense_batch.cpp
triangle_counting_batch.cpp
K-Means Clustering
Density-Based Spatial Clustering of Applications with Noise
Correlation and Variance-Covariance Matrices
Principal Component Analysis
Principal Components Analysis Transform
Singular Value Decomposition
Association Rules
Kernel Functions
Expectation-Maximization
Cholesky Decomposition
QR Decomposition
Outlier Detection
Distance Matrix
Distributions
Engines
Moments of Low Order
Quantile
Quality Metrics
Sorting
Normalization
Optimization Solvers
Decision Forest
Decision Trees
Gradient Boosted Trees
Stump
Linear and Ridge Regressions
LASSO and Elastic Net Regressions
k-Nearest Neighbors (kNN) Classifier
Implicit Alternating Least Squares
Logistic Regression
Naïve Bayes Classifier
Support Vector Machine Classifier
Multi-class Classifier
Boosting
Visible to Intel only — GUID: GUID-B5CC86EF-42D3-4CF8-BF22-E1719DD0C685
Decision Tree
Decision trees partition the feature space into a set of hypercubes, and then fit a simple model in each hypercube. The simple model can be a prediction model, which ignores all predictors and predicts the majority (most frequent) class (or the mean of a dependent variable for regression), also known as 0-R or constant classifier.
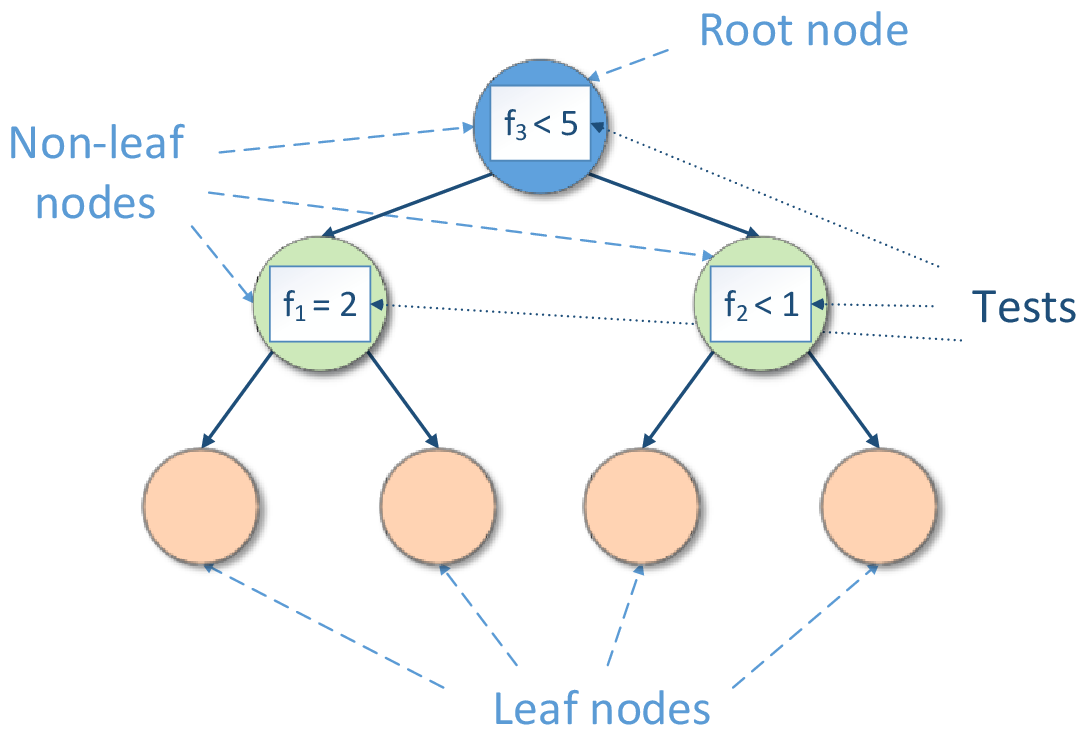
Decision tree induction forms a tree-like graph structure as shown in the figure below, where:
Each internal (non-leaf) node denotes a test on one of the features
Each branch descending from a non-leaf node corresponds to an outcome of the test
Each external node (leaf) denotes the mentioned simple model
Decision Tree Structure
A test is a rule for partitioning the feature space. A test depends on feature values. Each outcome of a test represents an appropriate hypercube associated with both the test and one of the descending branches.
If a test is a Boolean expression (for example,  or
or  , where f is a feature and c is a constant fitted during decision tree induction), the inducted decision tree is a binary tree, so its non-leaf nodes have exactly two branches, ‘true’ and ‘false’, each corresponding to the result of the Boolean expression.
, where f is a feature and c is a constant fitted during decision tree induction), the inducted decision tree is a binary tree, so its non-leaf nodes have exactly two branches, ‘true’ and ‘false’, each corresponding to the result of the Boolean expression.
Prediction is performed by starting at the root node of the tree, testing features by the test specified in this node, then moving down the tree branch corresponding to the outcome of the test for the given sample. This process is then repeated for the subtree rooted at the node, discovered at the selected branch. The final result is the prediction of the simple model at the leaf node.
Decision trees are often used in ensemble algorithms, such as boosting, bagging, or decision forest.