Visible to Intel only — GUID: GUID-17D49520-EE7E-40B9-ADC2-3215AF337484
Run a ROS 2 Sample Application in the Docker* Container
Run an Intel® RealSense™ ROS 2 Sample Application in Docker* Container
Run a GStreamer* Video Pipeline using GStreamer* Plugins in Docker* Container
Run a GStreamer* Audio Pipeline using GStreamer* Plugins in Docker* Container
Run a GStreamer* Video Pipeline using libv4l2 in Docker* Container
Run a GStreamer* Video Pipeline using the Intel® RealSense™ Plugin in the Docker* Container
Optional (Only for Sony* IMX390 Setups): Run a GStreamer* Video Pipeline using Sony’s IMX390 MIPI Sensor in Docker* Container
Run OpenVINO™ Sample Applications in Docker* Container
Run ROS 2 OpenVINO™ Toolkit Sample Applications in Docker* Container
Run Intel® oneAPI Base Toolkit Sample Applications in Docker* Container
Run Profiling Application in Docker* Container with VTune™ Profiler
Run OpenVINO™ Benchmarking Tool
Run the ADBSCAN Algorithm
Run the ADBSCAN Algorithm with Slamtec* RPLIDAR Input
Run the ADBSCAN Algorithm with Intel® RealSense™ Camera Input
Troubleshooting
Launch Wandering Application with Gazebo* Simulation
Launch Wandering Application on AAEON* Robot Kit
Launch Cartographer with 2D LIDAR
Run FastMapping Algorithm
Run ROS 2 Navigation Sample Applications Using the ITS Path Planner Plugin in a Docker* Container
ITS Path Planner Plugin Customization
Run the Edge Insights for Autonomous Mobile Robots Container in KVM Guest
Run a Collaborative SLAM System
Build New and Custom Docker* Images from the Edge Insights for Autonomous Mobile Robots SDK
Troubleshooting for Robot Tutorials
Visible to Intel only — GUID: GUID-17D49520-EE7E-40B9-ADC2-3215AF337484
Run the ADBSCAN Algorithm
This tutorial tells you how to run the ADBSCAN algorithm from EI for AMR using 2D Slamtec* RPLIDAR and Intel® RealSense™ camera input.
It outputs to the obstacle_array topic of type nav2_dynamic_msgs/ObstacleArray.
Prerequisites: You know how to connect and configure a Slamtec* RPLIDAR sensor. For details, see: Launch Cartographer with 2D LIDAR.
Run the ADBSCAN Algorithm with Slamtec* RPLIDAR Input
Go to the AMR_containers folder:
cd <edge_insights_for_amr_path>/Edge_Insights_for_Autonomous_Mobile_Robots_*/AMR_containers
Prepare the environment setup:
source 01_docker_sdk_env/docker_compose/05_tutorials/config/docker_compose.source export CONTAINER_BASE_PATH=`pwd` export ROS_DOMAIN_ID=17 # Unzip the ros2 bags if they were not unzipped before unzip 01_docker_sdk_env/docker_compose/06_bags.zip -d 01_docker_sdk_env/docker_compose/
Depending on the Slamtec* RPLIDAR availability, you have two possibilities:
Slamtec* RPLIDAR connected
Start a pre-configured yml file that starts the LIDAR Node and then the ADBSCAN application:
CHOOSE_USER=eiforamr docker-compose -f 01_docker_sdk_env/docker_compose/05_tutorials/adbscan_LIDAR.tutorial.yml up
No Slamtec* RPLIDAR connected
Start a pre-configured yml file that plays a ROS 2 bag containing LIDAR data and then the ADBSCAN application:
CHOOSE_USER=eiforamr docker-compose -f 01_docker_sdk_env/docker_compose/05_tutorials/adbscan_2D.tutorial.yml up
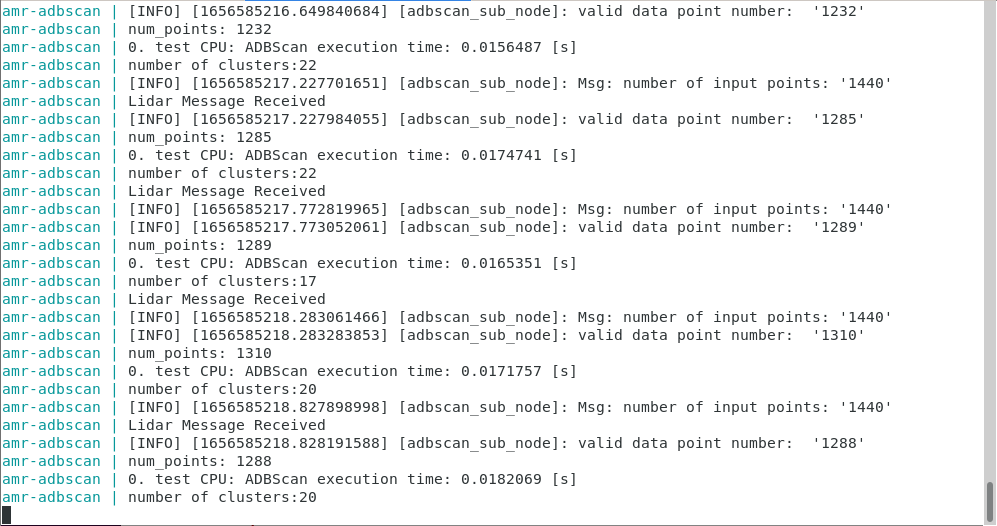
Expected output: ADBSCAN prints logs of its interpretation of the LIDAR data coming from the ROS 2 bag.
Run the ADBSCAN Algorithm with Intel® RealSense™ Camera Input
Go to the AMR_containers folder:
cd <edge_insights_for_amr_path>/Edge_Insights_for_Autonomous_Mobile_Robots_<version>/AMR_containers
Prepare the environment setup:
source 01_docker_sdk_env/docker_compose/05_tutorials/config/docker_compose.source export CONTAINER_BASE_PATH=`pwd` export ROS_DOMAIN_ID=17 # Unzip the ros2 bags if they were not unzipped before unzip 01_docker_sdk_env/docker_compose/06_bags.zip -d 01_docker_sdk_env/docker_compose/
Depending on the Intel® RealSense™ camera availability, you have two possibilities:
Intel® RealSense™ camera connected
Start a pre-configured yml file that starts the Intel® RealSense™ node and then the ADBSCAN application:
CHOOSE_USER=eiforamr docker-compose -f 01_docker_sdk_env/docker_compose/05_tutorials/adbscan_RealSense.tutorial.yml up
No Intel® RealSense™ camera connected
Start a pre-configured yml file that plays a ROS 2 bag containing Intel® RealSense™ data and then the ADBSCAN application:
CHOOSE_USER=eiforamr docker-compose -f 01_docker_sdk_env/docker_compose/05_tutorials/adbscan_RS.tutorial.yml up
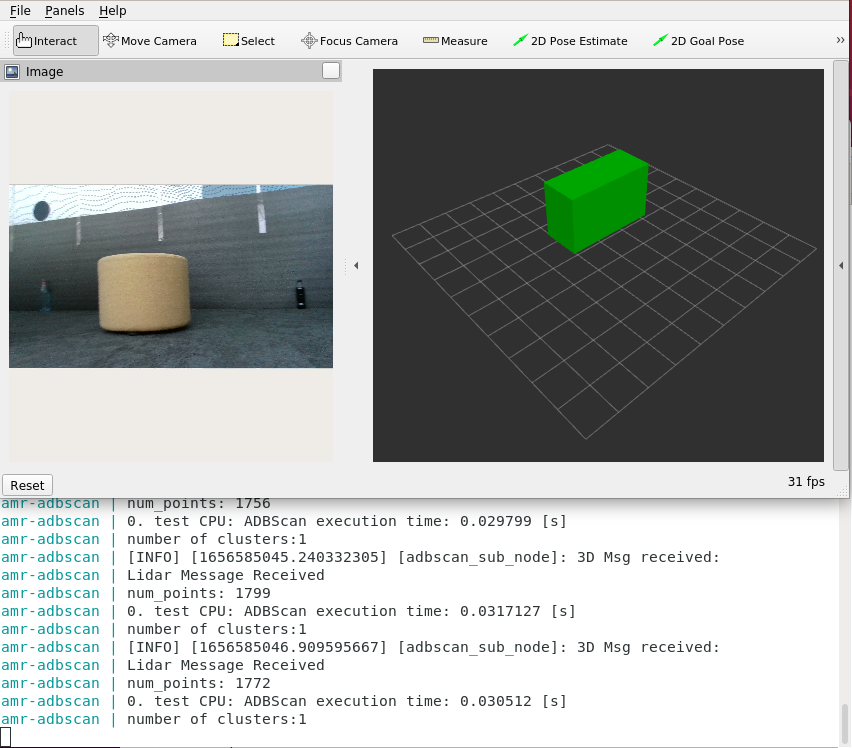
Expected result: rviz2 starts, and you see how ADBSCAN interprets Intel® RealSense™ data coming from the ros2 bag:
Troubleshooting
For general robot issues, go to: Troubleshooting for Robot Tutorials.