Visible to Intel only — GUID: GUID-653E35A6-E31A-4A36-95F1-F1D8ECF2C969
Run a ROS 2 Sample Application in the Docker* Container
Run an Intel® RealSense™ ROS 2 Sample Application in Docker* Container
Run a GStreamer* Video Pipeline using GStreamer* Plugins in Docker* Container
Run a GStreamer* Audio Pipeline using GStreamer* Plugins in Docker* Container
Run a GStreamer* Video Pipeline using libv4l2 in Docker* Container
Run a GStreamer* Video Pipeline using the Intel® RealSense™ Plugin in the Docker* Container
Optional (Only for Sony* IMX390 Setups): Run a GStreamer* Video Pipeline using Sony’s IMX390 MIPI Sensor in Docker* Container
Run OpenVINO™ Sample Applications in Docker* Container
Run ROS 2 OpenVINO™ Toolkit Sample Applications in Docker* Container
Run Intel® oneAPI Base Toolkit Sample Applications in Docker* Container
Run Profiling Application in Docker* Container with VTune™ Profiler
Run OpenVINO™ Benchmarking Tool
Run the ADBSCAN Algorithm
Launch Wandering Application with Gazebo* Simulation
Launch Wandering Application on AAEON* Robot Kit
Launch Cartographer with 2D LIDAR
Run FastMapping Algorithm
Run the Sample Application
Troubleshooting
Run ROS 2 Navigation Sample Applications Using the ITS Path Planner Plugin in a Docker* Container
ITS Path Planner Plugin Customization
Run the Edge Insights for Autonomous Mobile Robots Container in KVM Guest
Run a Collaborative SLAM System
Build New and Custom Docker* Images from the Edge Insights for Autonomous Mobile Robots SDK
Troubleshooting for Robot Tutorials
Visible to Intel only — GUID: GUID-653E35A6-E31A-4A36-95F1-F1D8ECF2C969
Run FastMapping Algorithm
Run the Sample Application
Go to the AMR_containers folder:
cd <edge_insights_for_amr_path>/Edge_Insights_for_Autonomous_Mobile_Robots_<version>/AMR_containers
Prepare the environment setup:
source 01_docker_sdk_env/docker_compose/05_tutorials/config/docker_compose.source export CONTAINER_BASE_PATH=`pwd` export ROS_DOMAIN_ID=17 # If the bags were not extracted before do it now unzip 01_docker_sdk_env/docker_compose/06_bags.zip -d 01_docker_sdk_env/docker_compose/
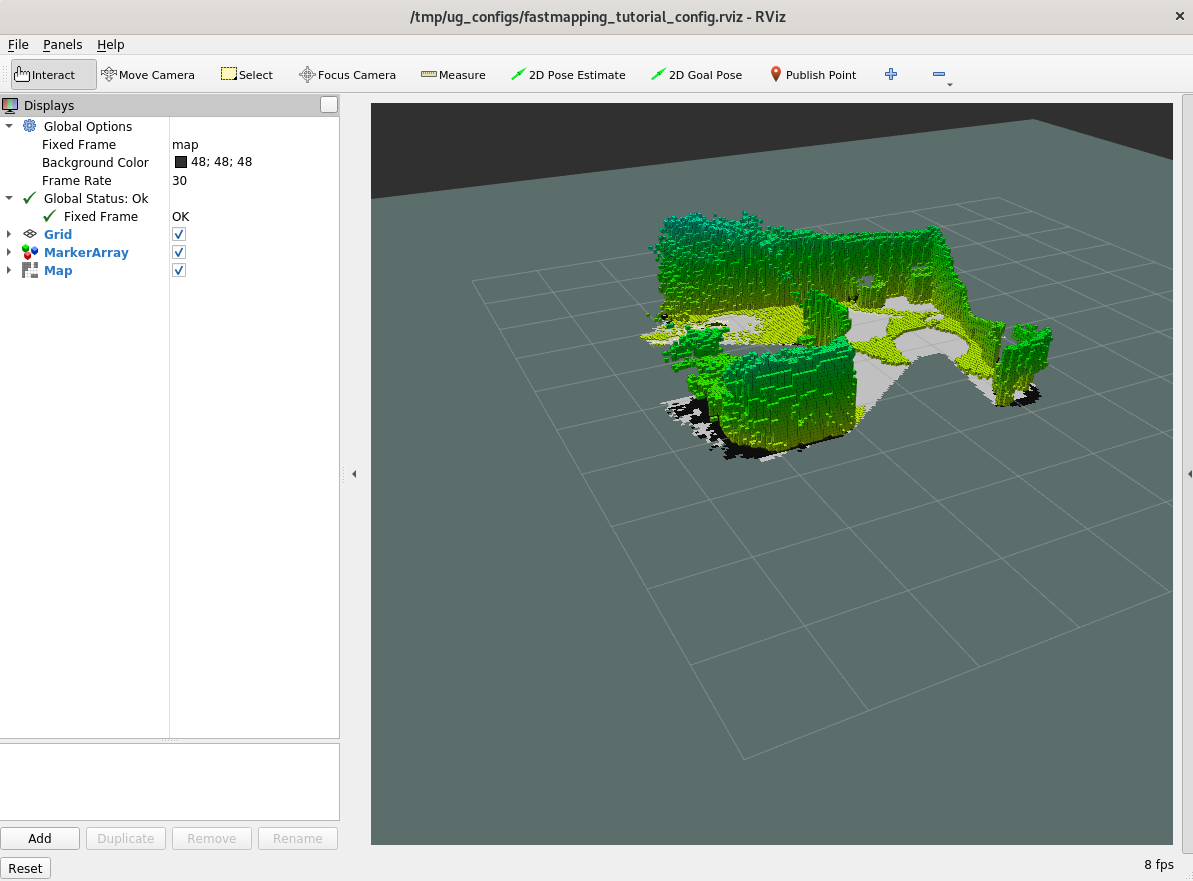
Run the FastMapping Algorithm using a bag of a robot spinning:
CHOOSE_USER=eiforamr docker-compose -f 01_docker_sdk_env/docker_compose/05_tutorials/fastmapping.demo.yml up
Expected output:
To close this, do one of the following:
Type Ctrl-c in the terminal where you did the up command.
Run this command in another terminal:
CHOOSE_USER=eiforamr docker-compose -f 01_docker_sdk_env/docker_compose/05_tutorials/fastmapping.demo.yml down
Troubleshooting
For general robot issues, go to: Troubleshooting for Robot Tutorials.