Visible to Intel only — GUID: ptv1725475212544
Ixiasoft
1.1. Compilation Overview
1.2. Design Analysis & Elaboration
1.3. Design Synthesis
1.4. Design Place and Route
1.5. Incremental Optimization Flow
1.6. Fast Forward Compilation Flow
1.7. Full Compilation Flow
1.8. HSSI Dual Simplex IP Generation Flow
1.9. Exporting Compilation Results
1.10. Clearing Compilation Results
1.11. Integrating Other EDA Tools
1.12. Compiler Optimization Techniques
1.13. Compilation Monitoring Mode
1.14. Viewing Quartus Database File Information
1.15. Understanding the Design Netlist Infrastructure
1.16. Using Synopsys* Design Constraint (SDC) on RTL Files
1.17. Using the Node Finder
1.18. Synthesis Language Support
1.19. Synthesis Settings Reference
1.20. Fitter Settings Reference
1.21. Design Compilation Revision History
2.1. Factors Affecting Compilation Results
2.2. Strategies to Reduce the Overall Compilation Time
2.3. Reducing Synthesis Time
2.4. Reducing Placement Time
2.5. Reducing Routing Time
2.6. Reducing Static Timing Analysis Time
2.7. Setting Process Priority
2.8. Reducing Compilation Time Revision History
Visible to Intel only — GUID: ptv1725475212544
Ixiasoft
1.16.5.1. Entity-based SDC-on-RTL Constraints Example
The following example illustrates how to create entity-based SDC-on-RTL constraints for a simplistic clock domain crossing synchronizer module. The function of the module is to synchronize a signal from another clock domain, driving it through a chain of registers to reduce the likelihood of a metastable signal propagating into the rest of the domain. You might have such a module in your code base.
Figure 139. Simplified Clock Domain Crossing Synchronizer Module
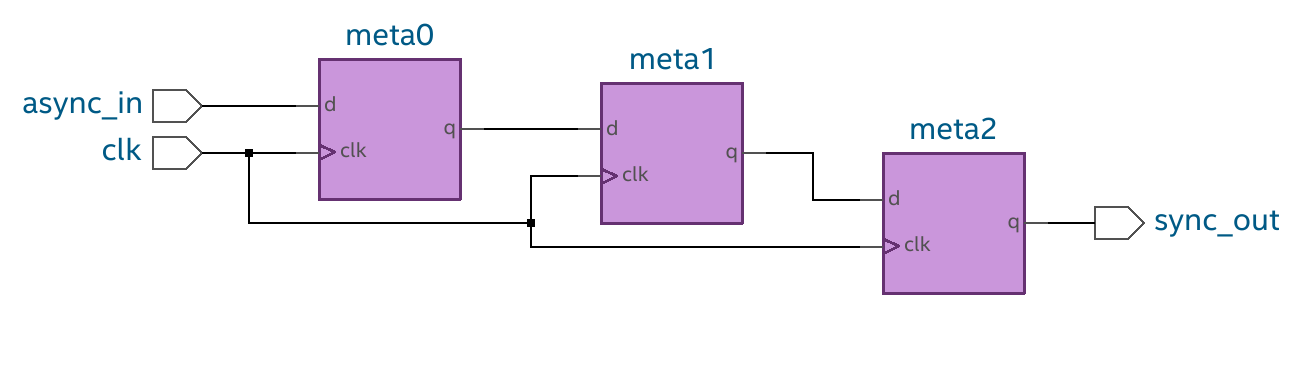
Typically, you would pair such a module with a false path exception to the first register in the chain, meta0. The false path exception might look like the following, and be placed in any of the main .sdc files for your project:
set_false_path -to *|meta0
The leading wildcard covers all possible instantiations of the module in a design. However, such a broad false path is risky, because the constraint could also unintentionally cut paths in RTL supplied by other groups or vendors. A safer method is to apply an exception to only instances of the cdc_sync module by using the following two steps:
- Define the false path exception in its own .sdc file.
- Add the .sdc file to the project with the appropriate entity-bound assignment.
The following example shows the false path exception in an .sdc file named cdc_sync_false_path.rtlsdc. The false path example cuts the path through the async_in port of the module, to demonstrate the support for SDC-on-RTL capabilities. You could also implement the same functionality with a cut to the meta0 register (-to [get_registers meta0]):
set_false_path -through [get_ports async_in]
The example does not specify a leading wildcard, because target node names in entity-bound SDC-on-RTL constraints are scoped to the module (entity) they are bound to. Write the target node names as if the module or entity was the top level of a design. When the constraints are processed, the target node names automatically include the prepended instance paths.
Add the .sdc file to the project with the following setting in the .qsf. The setting associates, or binds, the constraints and exceptions in the cdc_sync_false_path.rtlsdc file with all instances of the cdc_sync module, which you specify with the -entity option.
set_global_assignment -name RTL_SDC_FILE cdc_sync_false_path.rtlsdc -entity cdc_sync