Visible to Intel only — GUID: hco1423076597844
Ixiasoft
1. Answers to Top FAQs
2. About DSP Builder for Intel® FPGAs
3. DSP Builder for Intel FPGAs Advanced Blockset Getting Started
4. DSP Builder Design Flow
5. Primitive Library Blocks Tutorial
6. IP Tutorial
7. DSP Builder for Intel FPGAs (Advanced Blockset) Design Examples and Reference Designs
8. DSP Builder Design Rules, Design Recommendations, and Troubleshooting
9. About DSP Builder for Intel FPGAs Optimization
10. About Folding
11. Floating-Point Data Types
12. Design Configuration Library
13. IP Library
14. Interfaces Library
15. Primitives Library
16. Utilities Library
17. Simulink Supported Blocks
18. Document Revision History for DSP Builder for Intel FPGAs (Advanced Blockset) Handbook
3.1. Starting DSP Builder in MATLAB*
3.2. Browsing DSP Builder Libraries and Adding Blocks to a New Model
3.3. Browsing and Opening DSP Builder Design Examples
3.4. Creating a New DSP Builder Design with the DSP Builder New Model Wizard
3.5. Simulating, Verifying, Generating, and Compiling Your DSP Builder Design
4.1. Implementing your Design in DSP Builder Advanced Blockset
4.2. Verifying your DSP Builder Advanced Blockset Design in Simulink and MATLAB
4.3. Exploring DSP Builder Advanced Blockset Design Tradeoffs
4.4. Verifying your DSP Builder Design with C++ Software Models
4.5. Verifying your DSP Builder Advanced Blockset Design in the ModelSim Simulator
4.6. Verifying Your DSP Builder Design in Hardware
4.7. Integrating Your DSP Builder Advanced Blockset Design into Hardware
4.1.2.1. DSP Builder Block Interface Signals
4.1.2.2. Periods
4.1.2.3. Sample Rate
4.1.2.4. Building Multichannel Systems
4.1.2.5. Channelization for Two Channels with a Folding Factor of 3
4.1.2.6. Channelization for Four Channels with a Folding Factor of 3
4.1.2.7. Synchronization and Scheduling of Data with the Channel Signal
4.1.2.8. Simulink vs Hardware Design Representations
4.2.1. Verifying your DSP Builder Advanced Blockset Design with a Testbench
4.2.2. Running DSP Builder Advanced Blockset Automatic Testbenches
4.2.3. Using DSP Builder Advanced Blockset References
4.2.4. Setting Up Stimulus in DSP Builder Advanced Blockset
4.2.5. Analyzing your DSP Builder Advanced Blockset Design
5.1. Creating a Fibonacci Design from the DSP Builder Primitive Library
5.2. Setting the Parameters on the Testbench Source Blocks
5.3. Simulating the Fibonacci Design in Simulink
5.4. Modifying the DSP Builder Fibonacci Design to Generate Vector Signals
5.5. Simulating the RTL of the Fibonacci Design
6.1. Creating an IP Design
6.2. Simulating the IP Design in Simulink
6.3. Viewing Timing Closure and Viewing Resource Utilization for the DSP Builder IP Design
6.4. Reparameterizing the DSP Builder FIR Filter to Double the Number of Channels
6.5. Doubling the Target Clock Rate for a DSP Builder IP Design
7.1. DSP Builder Design Configuration Block Design Examples
7.2. DSP Builder FFT Design Examples
7.3. DSP Builder DDC Design Example
7.4. DSP Builder Filter Design Examples
7.5. DSP Builder Finite State Machine Design Example
7.6. DSP Builder Folding Design Examples
7.7. DSP Builder Floating Point Design Examples
7.8. DSP Builder Flow Control Design Examples
7.9. DSP Builder HDL Import Design Example
7.10. DSP Builder Host Interface Design Examples
7.11. DSP Builder Platform Design Examples
7.12. DSP Builder Primitive Block Design Examples
7.13. DSP Builder Reference Designs
7.14. DSP Builder Waveform Synthesis Design Examples
7.2.1. FFT
7.2.2. FFT without BitReverseCoreC Block
7.2.3. IFFT
7.2.4. IFFT without BitReverseCoreC Block
7.2.5. Floating-Point FFT
7.2.6. Floating-Point FFT without BitReverseCoreC Block
7.2.7. Floating-Point iFFT
7.2.8. Floating-Point iFFT without BitReverseCoreC Block
7.2.9. Multichannel FFT
7.2.10. Multiwire Transpose
7.2.11. Parallel FFT
7.2.12. Parallel Floating-Point FFT
7.2.13. Single-Wire Transpose
7.2.14. Switchable FFT/iFFT
7.2.15. Variable-Size Fixed-Point FFT
7.2.16. Variable-Size Fixed-Point FFT without BitReverseCoreC Block
7.2.17. Variable-Size Fixed-Point iFFT
7.2.18. Variable-Size Fixed-Point iFFT without BitReverseCoreC Block
7.2.19. Variable-Size Floating-Point FFT
7.2.20. Variable-Size Floating-Point FFT without BitReverseCoreC Block
7.2.21. Variable-Size Floating-Point iFFT
7.2.22. Variable-Size Floating-Point iFFT without BitReverseCoreC Block
7.2.23. Variable-Size Low-Resource FFT
7.2.24. Variable-Size Low-Resource Real-Time FFT
7.2.25. Variable-Size Supersampled FFT
7.4.1. Complex FIR Filter
7.4.2. Decimating CIC Filter
7.4.3. Decimating FIR Filter
7.4.4. Filter Chain with Forward Flow Control
7.4.5. FIR Filter with Exposed Bus
7.4.6. Fractional FIR Filter Chain
7.4.7. Fractional-Rate FIR Filter
7.4.8. Half-Band FIR Filter
7.4.9. IIR: Full-rate Fixed-point
7.4.10. IIR: Full-rate Floating-point
7.4.11. Interpolating CIC Filter
7.4.12. Interpolating FIR Filter
7.4.13. Interpolating FIR Filter with Multiple Coefficient Banks
7.4.14. Interpolating FIR Filter with Updating Coefficient Banks
7.4.15. Root-Raised Cosine FIR Filter
7.4.16. Single-Rate FIR Filter
7.4.17. Super-Sample Decimating FIR Filter
7.4.18. Super-Sample Fractional FIR Filter
7.4.19. Super-Sample Interpolating FIR Filter
7.4.20. Variable-Rate CIC Filter
7.7.1. Black-Scholes Floating Point
7.7.2. Double-Precision Real Floating-Point Matrix Multiply
7.7.3. Fine Doppler Estimator
7.7.4. Floating-Point Mandlebrot Set
7.7.5. General Real Matrix Multiply One Cycle Per Output
7.7.6. Newton Root Finding Tutorial Step 1—Iteration
7.7.7. Newton Root Finding Tutorial Step 2—Convergence
7.7.8. Newton Root Finding Tutorial Step 3—Valid
7.7.9. Newton Root Finding Tutorial Step 4—Control
7.7.10. Newton Root Finding Tutorial Step 5—Final
7.7.11. Normalizer
7.7.12. Single-Precision Complex Floating-Point Matrix Multiply
7.7.13. Single-Precision Real Floating-Point Matrix Multiply
7.7.14. Simple Nonadaptive 2D Beamformer
7.8.1. Avalon-ST Interface (Input and Output FIFO Buffer) with Backpressure
7.8.2. Avalon-ST Interface (Output FIFO Buffer) with Backpressure
7.8.3. Kronecker Tensor Product
7.8.4. Parallel Loops
7.8.5. Primitive FIR with Back Pressure
7.8.6. Primitive FIR with Forward Pressure
7.8.7. Primitive Systolic FIR with Forward Flow Control
7.8.8. Rectangular Nested Loop
7.8.9. Sequential Loops
7.8.10. Triangular Nested Loop
7.12.1. 8×8 Inverse Discrete Cosine Transform
7.12.2. Automatic Gain Control
7.12.3. Bit Combine for Boolean Vectors
7.12.4. Bit Extract for Boolean Vectors
7.12.5. Color Space Converter
7.12.6. CORDIC from Primitive Blocks
7.12.7. Digital Predistortion Forward Path
7.12.8. Fibonacci Series
7.12.9. Folded Vector Sort
7.12.10. Fractional Square Root Using CORDIC
7.12.11. Fixed-point Maths Functions
7.12.12. Gaussian Random Number Generator
7.12.13. Hello World
7.12.14. Hybrid Direct Form and Transpose Form FIR Filter
7.12.15. Loadable Counter
7.12.16. Matrix Initialization of LUT
7.12.17. Matrix Initialization of Vector Memories
7.12.18. Multichannel IIR Filter
7.12.19. Quadrature Amplitude Modulation
7.12.20. Reinterpret Cast for Bit Packing and Unpacking
7.12.21. Run-time Configurable Decimating and Interpolating Half-Rate FIR Filter
7.12.22. Square Root Using CORDIC
7.12.23. Test CORDIC Functions with the CORDIC Block
7.12.24. Uniform Random Number Generator
7.12.25. Vector Sort—Sequential
7.12.26. Vector Sort—Iterative
7.12.27. Vector Initialization of Sample Delay
7.12.28. Wide Single-Channel Accumulators
7.13.1. 1-Antenna WiMAX DDC
7.13.2. 2-Antenna WiMAX DDC
7.13.3. 1-Antenna WiMAX DUC
7.13.4. 2-Antenna WiMAX DUC
7.13.5. 4-Carrier, 2-Antenna W-CDMA DDC
7.13.6. 1-Carrier, 2-Antenna W-CDMA DDC
7.13.7. 4-Carrier, 2-Antenna W-CDMA DUC
7.13.8. 4-Carrier, 4-Antenna DUC and DDC for LTE
7.13.9. 1-Carrier, 2-Antenna W-CDMA DDC
7.13.10. 4-Carrier, 2-Antenna High-Speed W-CDMA DUC at 368.64 MHz with Total Rate Change 32
7.13.11. 4-Carrier, 2-Antenna High-Speed W-CDMA DUC at 368.64 MHz with Total Rate Change 48
7.13.12. 4-Carrier, 2-Antenna High-Speed W-CDMA DUC at 307.2 MHz with Total Rate Change 40
7.13.13. Cholesky-based Matrix Inversion
7.13.14. Cholesky Solver Multiple Channels
7.13.15. Crest Factor Reduction
7.13.16. Direct RF with Synthesizable Testbench
7.13.17. Dynamic Decimating FIR Filter
7.13.18. Multichannel QR Decompostion
7.13.19. QR Decompostion
7.13.20. QRD Solver
7.13.21. Reconfigurable Decimation Filter
7.13.22. Single-Channel 10-MHz LTE Transmitter
7.13.23. STAP Radar Forward and Backward Substitution
7.13.24. STAP Radar Steering Generation
7.13.25. STAP Radar QR Decomposition 192x204
7.13.26. Time Delay Beamformer
7.13.27. Transmit and Receive Modem
7.13.28. Variable Integer Rate Decimation Filter
9.1. Associating DSP Builder with MATLAB
9.2. Setting Up Simulink for DSP Builder Designs
9.3. The DSP Builder Windows Shortcut
9.4. Setting DSP Builder Design Parameters with MATLAB Scripts
9.5. Managing your Designs
9.6. How to Manage Latency
9.7. Flow Control in DSP Builder Designs
9.8. Reset Minimization
9.9. About Importing HDL
11.1. DSP Builder Floating-Point Data Type Features
11.2. DSP Builder Supported Floating-Point Data Types
11.3. DSP Builder Round-Off Errors
11.4. Trading Off Logic Utilization and Accuracy in DSP Builder Designs
11.5. Upgrading Pre v14.0 Designs
11.6. Floating-Point Sine Wave Generator Tutorial
11.7. Newton-Raphson Root Finding Tutorial
11.8. Forcing Soft Floating-point Data Types with the Advanced Options
13.1.1. DSP Builder FIR and CIC Filters
13.1.2. DSP Builder FIR Filters
13.1.3. Channel Viewer (ChanView)
13.1.4. Complex Mixer (ComplexMixer)
13.1.5. Decimating CIC
13.1.6. Decimating FIR
13.1.7. Fractional Rate FIR
13.1.8. Interpolating CIC
13.1.9. Interpolating FIR
13.1.10. NCO
13.1.11. Real Mixer (Mixer)
13.1.12. Scale
13.1.13. Single-Rate FIR
14.1.1. Bus Slave (BusSlave)
14.1.2. Bus Stimulus (BusStimulus)
14.1.3. Bus Stimulus File Reader (Bus StimulusFileReader)
14.1.4. External Memory, Memory Read, Memory Write
14.1.5. Register Bit (RegBit)
14.1.6. Register Field (RegField)
14.1.7. Register Out (RegOut)
14.1.8. Shared Memory (SharedMem)
15.3.1. About Pruning and Twiddle for FFT Blocks
15.3.2. Bit Vector Combine (BitVectorCombine)
15.3.3. Butterfly Unit (BFU)
15.3.4. Butterfly I C (BFIC) (Deprecated)
15.3.5. Butterfly II C (BFIIC) (Deprecated)
15.3.6. Choose Bits (ChooseBits)
15.3.7. Crossover Switch (XSwitch)
15.3.8. Dual Twiddle Memory (DualTwiddleMemoryC)
15.3.9. Edge Detect (EdgeDetect)
15.3.10. Floating-Point Twiddle Generator (TwiddleGenF) (Deprecated)
15.3.11. Fully-Parallel FFTs (FFT2P, FFT4P, FFT8P, FFT16P, FFT32P, and FFT64P)
15.3.12. Fully-Parallel FFTs with Flexible Ordering (FFT2X, FFT4X, FFT8X, FFT16X, FFT32X, and FFT64X)
15.3.13. General Multitwiddle and General Twiddle (GeneralMultiTwiddle, GeneralMultVTwiddle, GeneralTwiddle, GeneralVTwiddle)
15.3.14. Hybrid FFT (Hybrid_FFT, HybridVFFT, HybridVFFT_btb)
15.3.15. Multiwire Transpose (MultiwireTranspose)
15.3.16. Parallel Pipelined FFT (PFFT_Pipe)
15.3.17. Pulse Divider (PulseDivider)
15.3.18. Pulse Multiplier (PulseMultiplier)
15.3.19. Single-Wire Transpose (Transpose)
15.3.20. Split Scalar (SplitScalar)
15.3.21. Streaming FFTs (FFT2, FFT4, VFFT2, and VFFT4)
15.3.22. Stretch Pulse (StretchPulse)
15.3.23. Twiddle Angle (TwiddleAngle)
15.3.24. Twiddle Generator (TwiddleGenC) Deprecated
15.3.25. Twiddle and Variable Twiddle (Twiddle and VTwiddle)
15.3.26. Twiddle ROM (TwiddleRom, TwiddleMultRom and TwiddleRomF (deprecated))
15.4.1. Absolute Value (Abs)
15.4.2. Accumulator (Acc)
15.4.3. Add
15.4.4. Add SLoad (AddSLoad)
15.4.5. AddSub
15.4.6. AddSubFused
15.4.7. AND Gate (And)
15.4.8. Bit Combine (BitCombine)
15.4.9. Bit Extract (BitExtract)
15.4.10. Bit Reverse (BitReverse)
15.4.11. Compare (CmpCtrl)
15.4.12. Complex Conjugate (ComplexConjugate)
15.4.13. Compare Equality (CmpEQ)
15.4.14. Compare Greater Than (CmpGE)
15.4.15. Compare Less Than (CmpLT)
15.4.16. Compare Not Equal (CmpNE)
15.4.17. Constant (Const)
15.4.18. Constant Multiply (Const Mult)
15.4.19. Convert
15.4.20. CORDIC
15.4.21. Counter
15.4.22. Count Leading Zeros, Ones, or Sign Bits (CLZ)
15.4.23. Dual Memory (DualMem)
15.4.24. Demultiplexer (Demux)
15.4.25. Divide
15.4.26. Fanout
15.4.27. FIFO
15.4.28. Floating-point Classifier (FloatClass)
15.4.29. Floating-point Multiply Accumulate (MultAcc)
15.4.30. ForLoop
15.4.31. Load Exponent (LdExp)
15.4.32. Left Shift (LShift)
15.4.33. Loadable Counter (LoadableCounter)
15.4.34. Look-Up Table (Lut)
15.4.35. Loop
15.4.36. Math
15.4.37. Minimum and Maximum (MinMax)
15.4.38. MinMaxCtrl
15.4.39. Multiply (Mult)
15.4.40. Multiplexer (Mux)
15.4.41. NAND Gate (Nand)
15.4.42. Negate
15.4.43. NOR Gate (Nor)
15.4.44. NOT Gate (Not)
15.4.45. OR Gate (Or)
15.4.46. Polynomial
15.4.47. Ready
15.4.48. Reinterpret Cast (ReinterpretCast)
15.4.49. Round
15.4.50. Sample Delay (SampleDelay)
15.4.51. Scalar Product
15.4.52. Select
15.4.53. Sequence
15.4.54. Shift
15.4.55. Sqrt
15.4.56. Subtract (Sub)
15.4.57. Sum of Elements (SumOfElements)
15.4.58. Trig
15.4.59. XNOR Gate (Xnor)
15.4.60. XOR Gate (Xor)
15.6.1. Anchored Delay
15.6.2. Complex to Real-Imag
15.6.3. Enabled Delay Line
15.6.4. Enabled Feedback Delay
15.6.5. Expand Scalar (ExpandScalar)
15.6.6. Finite State Machine
15.6.7. Nested Loops (NestedLoop1, NestedLoop2, NestedLoop3)
15.6.8. Pause
15.6.9. Reset-Priority Latch (SRlatch_PS)
15.6.10. Same Data Type (SameDT)
15.6.11. Set-Priority Latch (SRlatch)
15.6.12. Single-Cycle Latency Latch (latch_1L)
15.6.13. Tapped Line Delay (TappedLineDelay)
15.6.14. Variable Super-Sample Delay (VariableDelay)
15.6.15. Vector Fanout (VectorFanout)
15.6.16. Vector Multiplexer (VectorMux)
15.6.17. Zero-Latency Latch (latch_0L)
Visible to Intel only — GUID: hco1423076597844
Ixiasoft
7.6.1. Position, Speed, and Current Control for AC Motors
This design example implements a field-oriented control (FOC) algorithm for AC motors such as permanent magnet synchronous machines (PMSM). Industrial servo motors, where the precise control of torque is important, commonly use these algorithms. This design example includes position and speed control, which allow the control of rotor speed and angle.
Note: Intel has not tested this design on hardware and Intel does not provide a model of a motor.
The model file is psc_ctrl.mdl. Also, an equivalent fixed-point design, psc_ctrl_fixed.mdl, exists. To change the precision this design uses, refer to the setup_position_speed_current_controller_fixed.m script.
Functional Description
An encoder measures the rotor position in the motor, which the FPGA then reads. An analog-to-digital converter (ADC) measures current feedback, which the FPGA then reads.
Figure 52. AC Motor Control System Block Diagram
Each of the FOC, speed, and position feedback loops use a simple PI controller to reduce the steady state error to zero. In a real-world PI controller, you may also need to consider integrator windup and tune the PI gains appropriately. The feedback loops for the integral portion of the PI controllers are internal to the design.
The example assumes you sample the inputs at a rate of 100 kHz and the FPGA clock rate is 100 MHz (suitable for Cyclone IV devices). ALU folding reduces the resource usage by sharing operators such as adders, multipliers, cosine. The folding factor is set to 100 to allow each operator to be timeshared up 100 times, which gives an input sample rate of 1 Msps, but as the real input sample rate is 100 ksps, only one out of every ten input timeslots are used. DSP Builder identifies the used timeslots when valid_in is 1. Use valid_in to enable the latcher in the PI controller, which stores data for use in the next valid timeslot. The valid_out signal indicates when the ChannelOut block has valid output data. You can calculate nine additional channels on the samedesign without incurring extra latency (or extra FPGA resources).
You should adjust the folding factor to see the effect it has on hardware resources and latency. To adjust, change the Sample rate (MHz) parameter in the ChannelIn and ChannelOut blocks of the design either directly or change the FoldingFactor parameter in the setup script. For example, a clock frequency of 100 MHz and sample rate of 10 MHz gives a folding factor of 10. Disabling folding, or setting the factor to 1, results in no resource sharing and minimal latency. Generally, you should not set the folding factor greater than the number of shareable operators, that is, for 24 adders and 50 multipliers, use a maximum folding factor 50.
Note: The testbench does not support simulations if you adjust the folding factor.
The control algorithm, with the FOC, position, speed, control loops, vary the desired position across time. The three control loops are parameterized with minimum and maximum limits, and Pl values. These values are not optimized and are for demonstrations only.
Resource Usage
| Folding Factor | Add and Sub Blocks | Mult Blocks | Cos Blocks | Latency |
|---|---|---|---|---|
| No folding | 22 | 22 | 4 | 170 |
| >22 | 1 | 1 | 1 | 279 |
The example uses floating-point arithmetic that automatically avoids arithmetic overflow, but you can implement it in a fixed-point design and tune individual accuracies while manually avoiding overflows.
Hardware Generation
When hardware generation is disabled, the Simulink system simulates the design at the external sample rate of 100 kHz, so that it outputs a new value once every 100 kHz. When hardware generation is enabled, the design simulates at the FPGA clock rate (100 MHz), which represents real-life latency clock delays, but it only outputs a new value every 100 kHz. This mode slows the system simulation speed greatly as the model is evaluated 1,000 times for every output. The setup script for the design example automatically detects whether hardware generation is enabled and sets the sample rates accordingly. The example is configured with hardware generation disabled, which allows fast simulations. When you enable hardware generation, set a very small simulation time (for example 0.0001 s) as simulation may be very slow.
Figure 53. Input Position RequestAt 0 s, a position of 3 is requested and then at 0.5 s a position of 0 is requested. Also shows the actual position and motor feedback currents
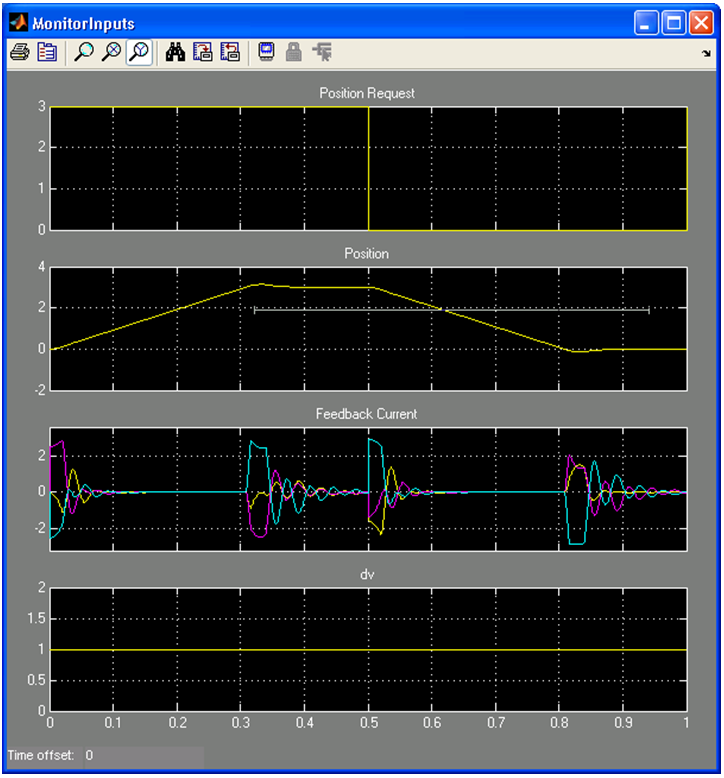
Figure 54. Output Response for Speed and TorqueThe maximum speed request saturates at 10 and the torque request saturates at 5 as set by parameters of the model. Also, some oscillation exists on the speed and torque requests because of nonoptimal settings for the PI controller causing an under-damped response.
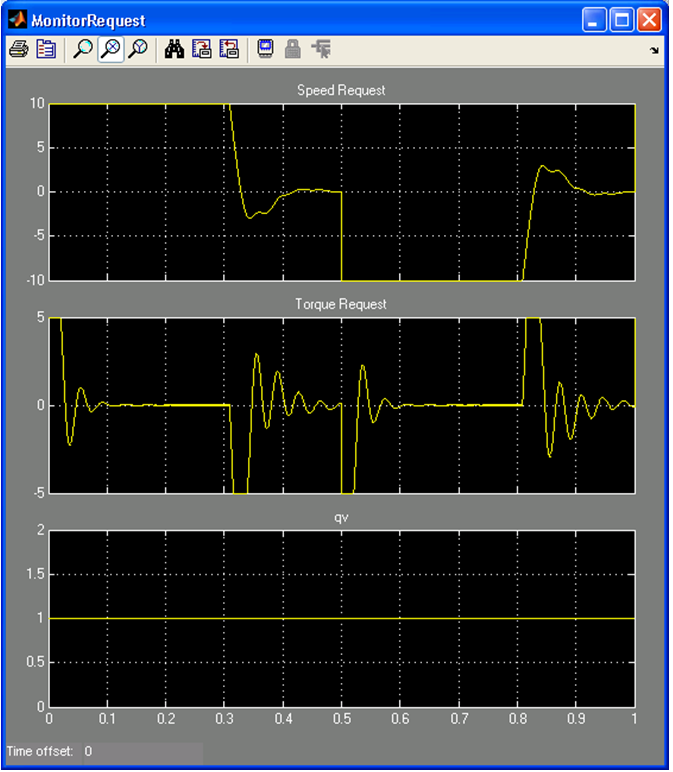
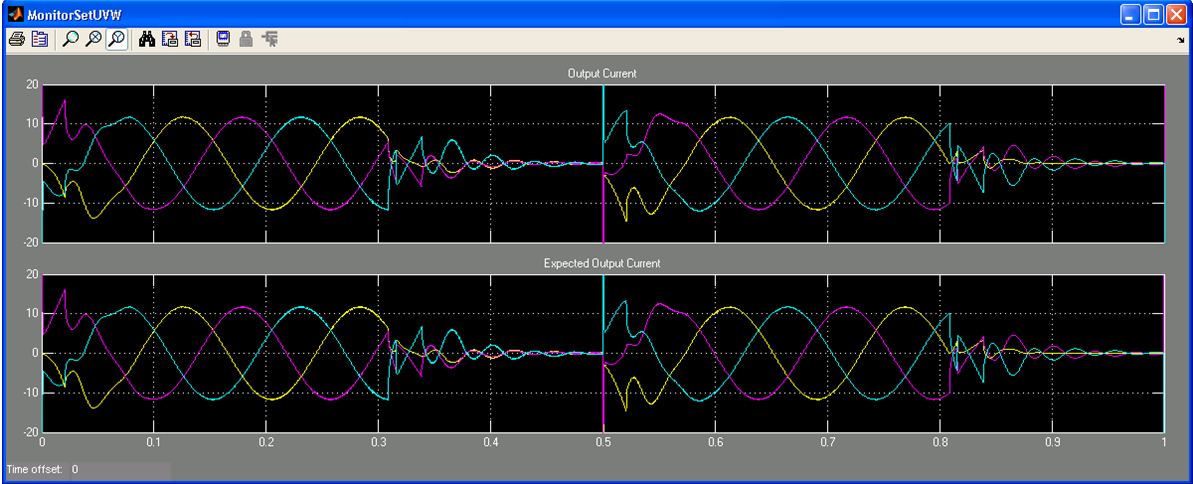
Figure 55. Output CurrentFrom 0 to 0.1, the motor is accelerating; 0.1 to 0.3, it is at a constant speed; 0.3 to 0.5, it is decelerating to stop. From 0.5 to 0.6, the motor accelerates in the opposite direction; from 0.6 to 0.8, it is at a constant speed; from 0.8 to 1, it is decelerating to stop.