Visible to Intel only — GUID: rnf1573061724714
Ixiasoft
1. Intel® High Level Synthesis Compiler Standard Edition User Guide
2. Overview of the Intel® High Level Synthesis (HLS) Compiler Standard Edition
3. Creating a High-Level Synthesis Component and Testbench
4. Verifying the Functionality of Your Design
5. Optimizing and Refining Your Component
6. Simulating Your Design
7. Synthesize your Component with Intel® Quartus® Prime Standard Edition
8. Integrating your IP into a System
A. Reviewing the High Level Design Reports (report.html)
B. Limitations of the Intel® HLS Compiler Standard Edition
C. Intel® HLS Compiler Standard Edition User Guide Archives
D. Document Revision History for Intel® HLS Compiler Standard Edition User Guide
Visible to Intel only — GUID: rnf1573061724714
Ixiasoft
6.3.2. Comparison of Explicit and Enqueued Function Calls
The ihc_hls_enqueue and ihc_hls_enqueue_noret functions allow a new invocation of a component to start every cycle if the component can be pipelined with a component initiation interval (II) of one. If the component II is greater than one, then the component invocation starts after II number of cycles.
Figure 2 illustrates the waveform of the signals for the component dut. The testbench does not include any enqueue function calls.
#include "HLS/hls.h"
#include <stdio.h>
component int dut(int a, int b) {
return a*b;
}
int main (void) {
int x1, x2, x3;
x1 = dut(1, 2);
x2 = dut(3, 4);
x3 = dut(5, 6);
printf("x1 = %d, x2 = %d, x3 = %d\n", x1, x2, x3);
return 0;
}
Figure 2. Waveform Diagram of the Signals for Component dut Without Enqueue Function Calls
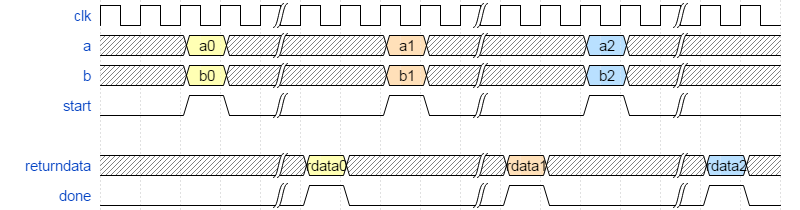
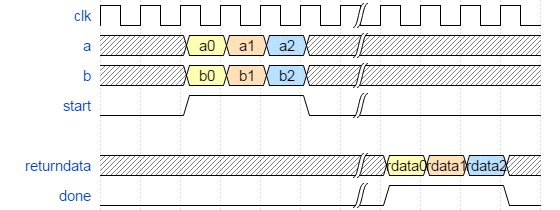
Figure 3 illustrates the waveform of the signals for the component dut when the testbench includes enqueue function calls. Observe how the component is passed new data each clock cycle, and compare this waveform with the earlier waveform.
#include "HLS/hls.h"
#include <stdio.h>
component int dut(int a, int b) {
return a*b;
}
int main (void) {
int x1, x2, x3;
ihc_hls_enqueue(&x1, &dut, 1, 2);
ihc_hls_enqueue(&x2, &dut, 3, 4);
ihc_hls_enqueue(&x3, &dut, 5, 6);
ihc_hls_component_run_all(&dut);
printf("x1 = %d, x2 = %d, x3 = %d\n", x1, x2, x3);
return 0;
}
Figure 3. Waveform Diagram of the Signals for Component dut With Enqueue Function Calls