A newer version of this document is available. Customers should click here to go to the newest version.
Media Pipeline Parallelism
For GPGPU, parallelism focuses on concerns like how the ND range is partitioned and related edge conditions. Multiple accelerators can work on this partitioned space, executing the same algorithm over the entire grid (SIMD). This is not the case for encode/decode.
Instead of analyzing the internal implementation details of an encoder or decoder to find opportunities for parallelism as it processes each frame, in most cases the entire operation would be treated as a black box. Decode implementations for a codec are intended to be interchangeable, like substituting one box for another. Encode replacement is more complex, since effects of a broader range of parameters must be considered. However, the strategy is usually the same - swap the entire optimization to one best suited to the hardware instead of attempting to optimize hotspots/inner loops.
In theory, operations could parallelize by slice within frames:
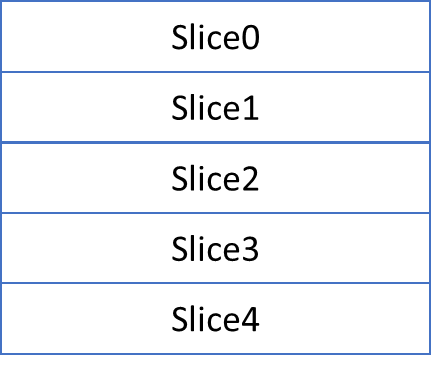
This is usually not practical. Since motion search cannot “see” across slice boundaries, overall compression quality is affected as the number of slices increase. Additional header bytes are required for slices as well.
Single streams can be processed asynchronously, but this is also not scalable. Dependencies between frames prevent parallelism. Turning off these dependencies reduces quality at a given bitrate. Increasing the number of frames in flight also increases latency.

For single stream optimization, Deep Link hyper encode may simplify development. Deep Link hyper encode can provide a performance boost when one or more discrete GPUs are available on a system where integrated/processor graphics is also available by automatically coordinating work between integrated and discrete GPUs. Single stream performance can be improved by utilizing the capabilities of dGPU and iGPU together.
The best way to scale efficiently while preserving quality and reducing latency is to process multiple streams simultaneously. (Note: for non-realtime processing even a single stream can be processed in parallel as segments since frames will not have dependencies across segment/GOP boundaries.)
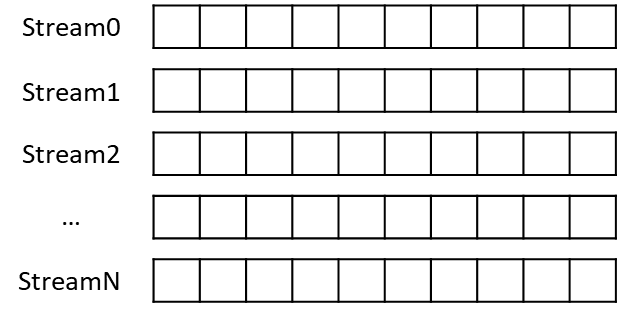
This approach provides ideal “embarrassing” parallelism which scales across accelerators. There are no dependencies across streams, so each accelerator can process as quickly as possible without coordination. For the Hyper Encode case, it is usually faster to schedule separate streams on iGPU and dGPU.
From a oneAPI perspective, these properties greatly simplify interoperability with SYCL. Media operations generally will not run “inside” kernels, which means there are fewer concerns at the API or development level. Media operations will either provide data for a kernel (act as a source), or they will work as a sink on data provided by a kernel. The main concern for performance is that the handoff between media operation and kernel implies synchronization and reduces opportunities to process asynchronously within a single stream. Processing multiple streams concurrently is the best workaround for this limitation.
Optimizing Media Operations
Since the algorithms are implemented in hardware, the main concerns with media development are data locality, synchronization, and providing a pipeline of work to keep the hardware busy.
Data locality: keep frames on the GPU, avoiding copying to the CPU unnecessarily. Since the media engine is connected to the GPU memory hierarchy, data can be shared locally between slice and media engine components. From a GPGPU perspective these operations work on local GPU data. Frames can be shared between this hardware and execution units with low latency/zero copy. This is especially important for discrete GPUs, since moving raw frames across a PCI bus can be expensive.
Synchronization: Because the multiple hardware units can function independently, they can work asynchronously. For best performance, the application should force synchronization with CPU as infrequently as possible. Design algorithms so that the accelerator can proceed as far as it can without interrupt.
Keeping the hardware busy: If the instruction queue is not kept full, the engine clock will go down. It can take a few milliseconds to ramp up to full clock speed again.