Visible to Intel only — GUID: GUID-E04489A0-3AA9-4B49-8AA4-73779D3FCB6D
Package Contents
Parallelizing Simple Loops
Parallelizing Complex Loops
Parallelizing Data Flow and Dependence Graphs
Work Isolation
Exceptions and Cancellation
Containers
Mutual Exclusion
Timing
Memory Allocation
The Task Scheduler
Design Patterns
Migrating from Threading Building Blocks (TBB)
Constrained APIs
Invoke a Callable Object
Appendix A Costs of Time Slicing
Appendix B Mixing With Other Threading Packages
References
parallel_for_each Body semantics and requirements
parallel_sort ranges interface extension
TBB_malloc_replacement_log Function
Type-specified message keys for join_node
Scalable Memory Pools
Helper Functions for Expressing Graphs
concurrent_lru_cache
task_group extensions
The customizing mutex type for concurrent_hash_map
Visible to Intel only — GUID: GUID-E04489A0-3AA9-4B49-8AA4-73779D3FCB6D
Dependence Graph
In a dependence graph, the nodes invoke body objects to perform computations and the edges create a partial ordering of these computations. At runtime, the library spawns and schedules tasks to execute the body objects when it is legal to do so according to the specified partial ordering. The following figure shows an example of an application that could be expressed using a dependence graph.
Dependence Graph for Making a Sandwich
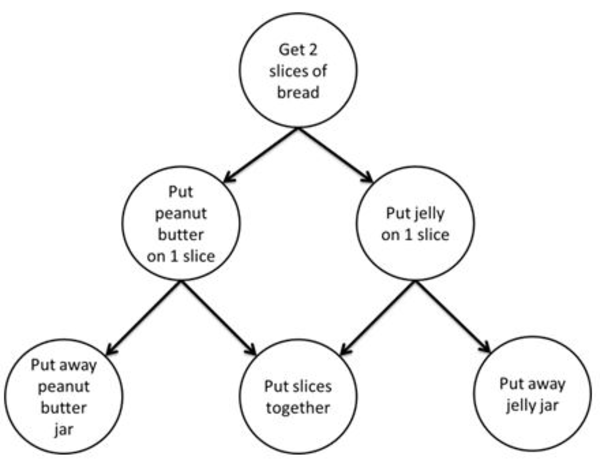
Dependence graphs are a special case of data flow graphs, where the data passed between nodes are of type oneapi::tbb::flow::continue_msg. Unlike a general data flow graph, nodes in a dependence graph do not spawn a task for each message they receive. Instead, they are aware of the number of predecessors they have, count the messages they receive and only spawn a task to execute their body when this count is equal to the total number of their predecessors.
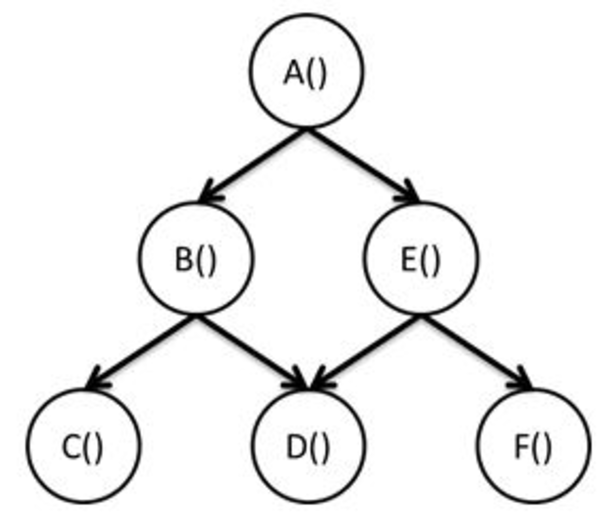
The following figure shows another example of a dependence graph. It has the same topology as the figure above, but with simple functions replacing the sandwich making steps. In this partial ordering, function A must complete executing before any other computation starts executing. Function B must complete before C and D start executing; and E must complete before D and F start executing. This is a partial ordering because, for example, there is no explicit ordering requirement between B and E or C and F.
Simple Dependence Graph
To implement this as a flow graph, continue_node objects are used for the nodes and continue_msg objects as the messages. A continue_node constructor takes two arguments:
template< typename Body > continue_node( graph &g, Body body)
The first argument is the graph it belongs to and the second is a function object or lambda expression. Unlike a function_node, a continue_node is always assumed to have unlimited concurrency and will immediately spawn a task whenever its dependencies are met.
The following code snippet is an implementation of the example in this figure.
typedef continue_node< continue_msg > node_t;
typedef const continue_msg & msg_t;
int main() {
oneapi::tbb::flow::graph g;
node_t A(g, [](msg_t){ a(); } );
node_t B(g, [](msg_t){ b(); } );
node_t C(g, [](msg_t){ c(); } );
node_t D(g, [](msg_t){ d(); } );
node_t E(g, [](msg_t){ e(); } );
node_t F(g, [](msg_t){ f(); } );
make_edge(A, B);
make_edge(B, C);
make_edge(B, D);
make_edge(A, E);
make_edge(E, D);
make_edge(E, F);
A.try_put( continue_msg() );
g.wait_for_all();
return 0;
}
One possible execution of this graph is shown below. The execution of D does not start until both B and E are finished. While a task is waiting in the wait_for_all, its thread can participate in executing other tasks from the oneTBB work pool.
Execution Timeline for a Dependence Graph
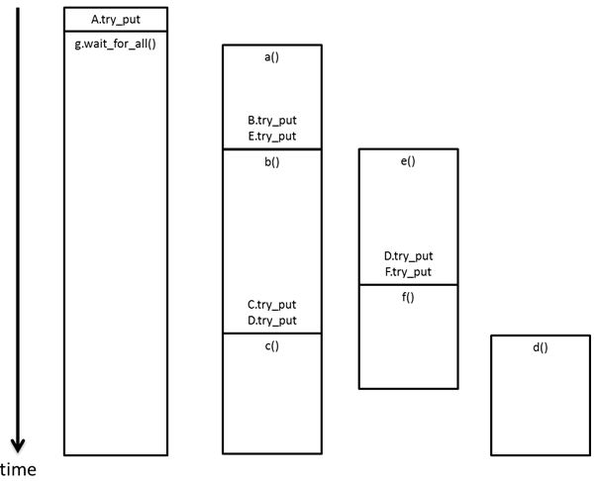
Again, it is important to note that all execution in the flow graph happens asynchronously. The call to A.try_put returns control to the calling thread quickly, after incrementing the counter and spawning a task to execute the body of A. Likewise, the body tasks execute the lambda expressions and then put a continue_msg to all successor nodes, if any. Only the call to wait_for_all blocks, as it should, and even in this case the calling thread may be used to execute tasks from the oneTBB work pool while it is waiting.
The above timeline shows the sequence when there are enough threads to execute all of the tasks that can be executed concurrently in parallel. If there are fewer threads, then some tasks that are spawned will need to wait until a thread is available to execute them.