By Christian Mills, with Introduction by Peter Cross
Introduction
In 2021, we were excited to publish many of the tutorials Christian Mills created that outlined how game engines could be used to showcase AI/ML on both Intel and non-Intel platforms. The tutorials were very well received by the game dev community, so we’re thrilled to highlight some of Christian’s more recent work in this space, and we cannot wait to try it out on our newly released Intel® Arc™ A-Series Graphics cards.
Overview
In this tutorial series, we will walk through training an object detector using the IceVision* library. We will then implement the trained model in a Unity* game engine project using OpenVINO™ toolkit™, an open-source toolkit for optimizing model inference.
The tutorial uses a downscaled subsample of HaGRID (Hand Gesture Recognition Image Dataset). The dataset contains annotated sample images for 18 distinct hand gestures and an additional no_gesture class to account for idle hands.
Reference Images
| Class |
Image |
|---|---|
| call |
|
| dislike |
|
| fist |
|
| four |
|
| like |
|
| mute |
|
| ok |
|
| one |
|
| palm |
|
| peace |
|
| peace_inverted |
|
| rock |
|
| stop |
|
| stop_inverted |
|
| three |
|
| three2 |
|
| two_up |
|
| two_up_inverted |
|










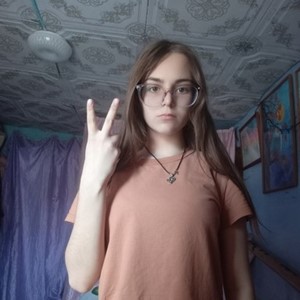


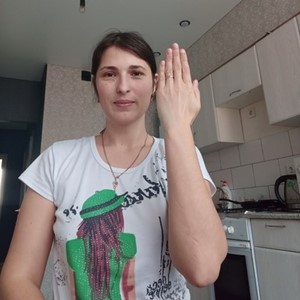




One could use a model trained on this dataset to map hand gestures and locations to user input in Unity.
Unity Demo
Hand Gesture Recognition for Unity* Demo
Overview
Part 1 covers finetuning a YOLOX Tiny model using the IceVision library and exporting it to OpenVINO's Intermediate Representation (IR) format. The training code is available in the Jupyter notebook linked below, and links for training on Google Colab and Kaggle are also available below.
| Jupyter Notebook | Colab | Kaggle |
| GitHub Repository | Open In Colab |
Note: The free GPU tier for Google Colab takes approximately 11 minutes per epoch, while the free GPU tier for Kaggle Notebooks takes around 15 minutes per epoch.
Setup Conda Environment
The IceVision library build upon specific versions of libraries like fastai and mmdetection, and the cumulative dependency requirements mean it is best to use a dedicated virtual environment. Below are the steps to create a virtual environment using Conda. Be sure to execute each command in the provided order.
Important: IceVision currently only supports Linux/macOS. Try using WSL (Windows Subsystem for Linux) if training locally on Windows.
Install CUDA Toolkit
You might need to install the CUDA Toolkit on your system if you plan to run the training code locally. CUDA requires an Nvidia GPU. Version 11.1.0 of the toolkit is available at the link below. Both Google Colab and Kaggle Notebooks already have CUDA installed.
Conda environment setup steps
conda create --name icevision python==3.8 conda activate icevision pip install torch==1.10.0+cu111 torchvision==0.11.1+cu111 -f https://download.pytorch.org/whl/torch_stable.html pip install mmcv-full==1.3.17 -f https://download.openmmlab.com/mmcv/dist/cu111/torch1.10.0/index.html pip install mmdet==2.17.0 pip install icevision==0.11.0 pip install icedata==0.5.1 pip install setuptools==59.5.0 pip install openvino-dev pip install distinctipy pip install jupyter pip install onnxruntime pip install onnx-simplifier pip install kaggle
The mmdet package contains the pretrained YOLOX Tiny model we will finetune with IceVision. The package depends on the mmcv-full library, which is picky about the CUDA version used by PyTorch. We need to install the PyTorch version with the exact CUDA version expected by mmcv-full.
The icevision package provides the functionality for data curation, data transforms, and training loops we'll use to train the model. The icedata package provides the functionality we will use to create a custom parser to read the dataset.
The openvino-dev pip package contains the model-conversion script to convert trained models from ONNX to OpenVINO's IR format.
We will use the distinctipy pip package to generate a visually distinct colormap for drawing bounding boxes on images.
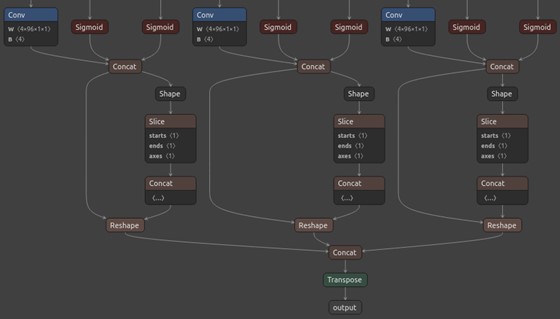
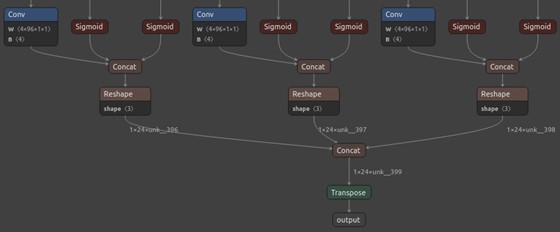
The ONNX models generated by PyTorch are not always the most concise. We can use the onnx-simplifier package to tidy up the exported model. This step is entirely optional.
Original ONNX model (Netron)
Simplified ONNX model (Netron)
Colab and Kaggle Setup Requirements
When running the training code on Google Colab and Kaggle Notebooks, we need to uninstall several packages before installing IceVision and its dependencies to avoid conflicts. The platform-specific setup steps are at the top of the notebooks linked above.
Import Dependencies
IceVision will download some additional resources the first time we import the library.
Import IceVision library
from icevision.all import *
Import and configure Pandas
import pandas as pd pd.set_option('max_colwidth', None) pd.set_option('display.max_rows', None) pd.set_option('display.max_columns', None)
Configure Kaggle API
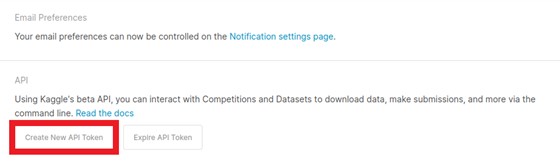
The Kaggle API tool requires an API Key for a Kaggle account. Sign in or create a Kaggle account using the link below, then click the Create New API Token button.
- Kaggle Account Settings: https://www.kaggle.com/me/account
Enter Kaggle username and API tokencreds = '{"username":"","key":""}'
Save Kaggle credentials if none are present - Source: https://github.com/fastai/fastbook/blob/master/09_tabular.ipynb
cred_path = Path('~/.kaggle/kaggle.json').expanduser() # Save API key to a json file if it does not already exist if not cred_path.exists(): cred_path.parent.mkdir(exist_ok=True) cred_path.write_text(creds) cred_path.chmod(0o600)
Import Kaggle APIfrom kaggle import api
Download the Dataset
Now that we have our Kaggle credentials set, we need to define the dataset and where to store it. I made two versions of the dataset available on Kaggle. One contains approximately thirty thousand training samples, and the other has over one hundred and twenty thousand.
Define path to dataset
We will use the default archive and data folders for the fastai library (installed with IceVision) to store the compressed and uncompressed datasets.
from fastai.data.external import URLs
dataset_name = 'hagrid-sample-30k-384p' # dataset_name = 'hagrid-sample-120k-384p' kaggle_dataset = f'innominate817/{dataset_name}' archive_dir = URLs.path() dataset_dir = archive_dir/'../data' archive_path = Path(f'{archive_dir}/{dataset_name}.zip') dataset_path = Path(f'{dataset_dir}/{dataset_name}')
Define method to extract the dataset from an archive file
def file_extract(fname, dest=None): "Extract `fname` to `dest` using `tarfile` or `zipfile`." if dest is None: dest = Path(fname).parent fname = str(fname) if fname.endswith('gz'): tarfile.open(fname, 'r:gz').extractall(dest) elif fname.endswith('zip'): zipfile.ZipFile(fname ).extractall(dest) else: raise Exception(f'Unrecognized archive: {fname}')
Download the dataset if it is not present
The archive file for the 30K dataset is 863MB, so we don't want to download it more than necessary.
if not archive_path.exists(): api.dataset_download_cli(kaggle_dataset, path=archive_dir) file_extract(fname=archive_path, dest=dataset_dir)
Inspect the Dataset
We can start inspecting the dataset once it finishes downloading.
dir_content = list(dataset_path.ls()) annotation_dir = dataset_path/'ann_train_val' dir_content.remove(annotation_dir) img_dir = dir_content[0] annotation_dir, img_dir
(Path('/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val'), Path('/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/hagrid_30k'))
Inspect the annotation folder
The bounding box annotations for each image are stored in JSON files organized by object class. The files contain annotations for all 552,992 images from the full HaGRID dataset.
pd.DataFrame([file.name for file in list(annotation_dir.ls())])
|
|
0 |
| 0 |
call.json |
| 1 |
dislike.json |
| 2 |
fist.json |
| 3 |
four.json |
| 4 |
like.json |
| 5 |
mute.json |
| 6 |
ok.json |
| 7 |
one.json |
| 8 |
palm.json |
| 9 |
peace.json |
| 10 |
peace_inverted.json |
| 11 |
rock.json |
| 12 |
stop.json |
| 13 |
stop_inverted.json |
| 14 |
three.json |
| 15 |
three2.json |
| 16 |
two_up.json |
| 17 |
two_up_inverted.json |
Inspect the image folder
The sample images are stored in folders separated by object class.
pd.DataFrame([folder.name for folder in list(img_dir.ls())])
|
|
0 |
| 0 |
train_val_call |
| 1 |
train_val_dislike |
| 2 |
train_val_fist |
| 3 |
train_val_four |
| 4 |
train_val_like |
| 5 |
train_val_mute |
| 6 |
train_val_ok |
| 7 |
train_val_one |
| 8 |
train_val_palm |
| 9 |
train_val_peace |
| 10 |
train_val_peace_inverted |
| 11 |
train_val_rock |
| 12 |
train_val_stop |
| 13 |
train_val_stop_inverted |
| 14 |
train_val_three |
| 15 |
train_val_three2 |
| 16 |
train_val_two_up |
| 17 |
train_val_two_up_inverted |
Get image file paths
We can use the get_image_file method to get the full paths for every image file in the image directory.
files = get_image_files(img_dir) len(files)
31833
Inspect files
pd.DataFrame([files[0], files[-1]])
|
|
0 |
| 0 |
/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/hagrid_30k/train_val_call/00005c9c-3548-4a8f-9d0b-2dd4aff37fc9.jpg |
| 1 |
/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/hagrid_30k/train_val_two_up_inverted/fff4d2f6-9890-4225-8d9c-73a02ba8f9ac.jpg |
Inspect one of the training images
The sample images are all downscaled to 384p.
import PIL img = PIL.Image.open(files[0]).convert('RGB') print(f"Image Dims: {img.shape}") img
Image Dims: (512, 384)

Create a dictionary that maps image names to file paths
Let's create a dictionary to quickly obtain full image file paths, given a file name. We will need this later.
img_dict = {file.name.split('.')[0] : file for file in files} list(img_dict.items())[0]
('00005c9c-3548-4a8f-9d0b-2dd4aff37fc9', Path('/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/hagrid_30k/train_val_call/00005c9c-3548-4a8f-9d0b-2dd4aff37fc9.jpg'))
Get list of annotation file paths
import os from glob import glob
annotation_paths = glob(os.path.join(annotation_dir, "*.json")) annotation_paths
['/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/fist.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/one.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/rock.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/stop_inverted.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/like.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/two_up.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/two_up_inverted.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/peace.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/stop.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/four.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/dislike.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/palm.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/call.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/three2.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/ok.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/mute.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/three.json', '/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/ann_train_val/peace_inverted.json']
Create annotations dataframe
Next, we will read all the image annotations into a single Pandas DataFrame and filter out annotations for images that are not present in the current subsample.
cls_dataframes = (pd.read_json(f).transpose() for f in annotation_paths) annotation_df = pd.concat(cls_dataframes, ignore_index=False) annotation_df = annotation_df.loc[list(img_dict.keys())] annotation_df.head()
|
|
bboxes |
labels |
leading_hand |
leading_conf |
user_id |
| 00005c9c-3548-4a8f-9d0b-2dd4aff37fc9 |
[[0.23925175, 0.28595301, 0.25055143, 0.20777627]] |
[call] |
right | 1 |
5a389ffe1bed6660a59f4586c7d8fe2770785e5bf79b09334aa951f6f119c024 |
| 0020a3db-82d8-47aa-8642-2715d4744db5 |
[[0.5801012999999999, 0.53265105, 0.14562138, 0.12286348]] |
[call] |
left | 1 |
0d6da2c87ef8eabeda2dcfee2dc5b5035e878137a91b149c754a59804f3dce32 |
| 004ac93f-0f7c-49a4-aadc-737e0ad4273c |
[[0.46294793, 0.26419774, 0.13834939000000002, 0.10784189]] |
[call] |
right | 1 |
d50f05d9d6ca9771938cec766c3d621ff863612f9665b0e4d991c086ec04acc9 |
| 006cac69-d3f0-47f9-aac9-38702d038ef1 |
[[0.38799208, 0.44643898, 0.27068787, 0.18277858]] |
[call] |
right | 1 |
998f6ad69140b3a59cb9823ba680cce62bf2ba678058c2fc497dbbb8b22b29fe |
| 00973fac-440e-4a56-b60c-2a06d5fb155d |
[[0.40980118, 0.38144198, 0.08338464, 0.06229785], [0.6122035100000001, 0.6780825500000001, 0.04700606, 0.07640522]] |
[call, no_gesture] |
right | 1 |
4bb3ee1748be58e05bd1193939735e57bb3c0ca59a7ee38901744d6b9e94632e |
Notice that one of the samples contains a no_gesture label to identify an idle hand in the image.
Inspect annotation data for sample image
We can retrieve the annotation data for a specific image file using its name.
file_id = files[0].name.split('.')[0] file_id
'00005c9c-3548-4a8f-9d0b-2dd4aff37fc9'
The image file names are the index values for the annotation DataFrame.
annotation_df.loc[file_id].to_frame()
|
|
00005c9c-3548-4a8f-9d0b-2dd4aff37fc9 |
| bboxes |
[[0.23925175, 0.28595301, 0.25055143, 0.20777627]] |
| labels |
[call] |
| leading_hand |
right |
| leading_conf |
[[0.23925175, 0.28595301, 0.25055143, 0.20777627]] |
| user_id |
5a389ffe1bed6660a59f4586c7d8fe2770785e5bf79b09334aa951f6f119c024 |
The bboxes entry contains the [top-left-X-position, top-left-Y-position, width, height] information for any bounding boxes. The values are scaled based on the image dimensions. We multiply top-left-X-position and width values by the image width and multiply top-left-Y-position and height values by the image height to obtain the actual values.
Download font file
We need a font file to annotate the images with class labels. We can download one from Google Fonts.
font_file = 'KFOlCnqEu92Fr1MmEU9vAw.ttf' if not os.path.exists(font_file): !wget https://fonts.gstatic.com/s/roboto/v30/$font_file
Annotate sample image
from PIL import ImageDraw width, height = img.size annotated_img = img.copy() draw = ImageDraw.Draw(annotated_img) fnt_size = 25 annotation = annotation_df.loc[file_id] for i in range(len(annotation['labels'])): x, y, w, h = annotation['bboxes'][i] x *= width y *= height w *= width h *= height shape = (x, y, x+w, y+h) draw.rectangle(shape, outline='red') fnt = PIL.ImageFont.truetype(font_file, fnt_size) draw.multiline_text((x, y-fnt_size-5), f"{annotation['labels'][i]}", font=fnt, fill='red') print(annotated_img.size) annotated_img
(384, 512)

Create a class map
We need to provide IceVision with a class map that maps index values to unique class names.
labels = annotation_df['labels'].explode().unique().tolist() labels
['call', 'no_gesture', 'dislike', 'fist', 'four', 'like', 'mute', 'ok', 'one', 'palm', 'peace', 'peace_inverted', 'rock', 'stop', 'stop_inverted', 'three', 'three2', 'two_up', 'two_up_inverted']
IceVision adds an additional background class at index 0.
class_map = ClassMap(labels) class_map
<ClassMap: {'background': 0, 'call': 1, 'no_gesture': 2, 'dislike': 3, 'fist': 4, 'four': 5, 'like': 6, 'mute': 7, 'ok': 8, 'one': 9, 'palm': 10, 'peace': 11, 'peace_inverted': 12, 'rock': 13, 'stop': 14, 'stop_inverted': 15, 'three': 16, 'three2': 17, 'two_up': 18, 'two_up_inverted': 19}>
Note: The background class is not included in the final model.
Create Dataset Parser
Now we can create a custom Parser class that tells IceVision how to read the dataset.
View template for an object detection record
template_record = ObjectDetectionRecord() template_record
BaseRecord common: - Image size None - Record ID: None - Filepath: None - Img: None detection: - Class Map: None - Labels: [] - BBoxes: []
View template for an object detection parser
Parser.generate_template(template_record)
class MyParser(Parser): def __init__(self, template_record): super().__init__(template_record=template_record) def __iter__(self) -> Any: def __len__(self) -> int: def record_id(self, o: Any) -> Hashable: def parse_fields(self, o: Any, record: BaseRecord, is_new: bool): record.set_img_size(<ImgSize>) record.set_filepath(<Union[str, Path]>) record.detection.set_class_map(<ClassMap>) record.detection.add_labels(<Sequence[Hashable]>) record.detection.add_bboxes(<Sequence[BBox]>)
Define custom parser class
As mentioned earlier, we need the dimensions for an image to scale the corresponding bounding box information. The dataset contains images with different resolutions, so we need to check for each image.
class HagridParser(Parser): def __init__(self, template_record, annotations_df, img_dict, class_map): super().__init__(template_record=template_record) self.img_dict = img_dict self.df = annotations_df self.class_map = class_map def __iter__(self) -> Any: for o in self.df.itertuples(): yield o def __len__(self) -> int: return len(self.df) def record_id(self, o: Any) -> Hashable: return o.Index def parse_fields(self, o: Any, record: BaseRecord, is_new: bool): filepath = self.img_dict[o.Index] width, height = PIL.Image.open(filepath).convert('RGB').size record.set_img_size(ImgSize(width=width, height=height)) record.set_filepath(filepath) record.detection.set_class_map(self.class_map) record.detection.add_labels(o.labels) bbox_list = [] for i, label in enumerate(o.labels): x = o.bboxes[i][0]*width y = o.bboxes[i][1]*height w = o.bboxes[i][2]*width h = o.bboxes[i][3]*height bbox_list.append( BBox.from_xywh(x, y, w, h)) record.detection.add_bboxes(bbox_list)
Create a custom parser object
parser = HagridParser(template_record, annotation_df, img_dict, class_map) len(parser)
31833
Parse annotations to create records
We will randomly split the samples into training and validation sets.
# Randomly split our data into train/valid data_splitter = RandomSplitter([0.8, 0.2]) train_records, valid_records = parser.parse(data_splitter, cache_filepath=f'{dataset_name}-cache.pkl')
Inspect training records
train_records[0]
BaseRecord common: - Filepath: /mnt/980SSD_1TB_2/Datasets/hagrid-sample-30k-384p/hagrid_30k/train_val_one/2507aacb-43d2-4114-91f1-008e3c7a181c.jpg - Img: None - Record ID: 2507aacb-43d2-4114-91f1-008e3c7a181c - Image size ImgSize(width=640, height=853) detection: - BBoxes: [<BBox (xmin:153.0572608, ymin:197.40873228, xmax:213.5684992, ymax:320.45228481000004)>, <BBox (xmin:474.20276479999995, ymin:563.67557885, xmax:520.8937472, ymax:657.61167499)>] - Class Map: <ClassMap: {'background': 0, 'call': 1, 'no_gesture': 2, 'dislike': 3, 'fist': 4, 'four': 5, 'like': 6, 'mute': 7, 'ok': 8, 'one': 9, 'palm': 10, 'peace': 11, 'peace_inverted': 12, 'rock': 13, 'stop': 14, 'stop_inverted': 15, 'three': 16, 'three2': 17, 'two_up': 18, 'two_up_inverted': 19}> - Labels: [9, 2]
show_record(train_records[0], figsize = (10,10), display_label=True )
show_records(train_records[1:4], ncols=3,display_label=True)

Define DataLoader Objects
The YOLOX model examines an input image using the stride values [8, 16, 32] to detect objects of various sizes.
The max number of detections depends on the input resolution and these stride values. Given a 384x512 image, the model will make (384/8)*(512/8) + (384/16)*(512/16) + (384/32)*(512/32) = 4032 predictions. Although, many of those predictions get filtered out during post-processing.
Here, we can see the difference in results when using a single stride value in isolation with a YOLOX model trained on the COCO dataset.
Stride 8

Stride 16

Stride 32

Define stride values
strides = [8, 16, 32] max_stride = max(strides)
Select a multiple of the max stride value as the input resolution
We need to set the input height and width to multiples of the highest stride value (i.e., 32).
[max_stride*i for i in range(7,21)]
[224, 256, 288, 320, 352, 384, 416, 448, 480, 512, 544, 576, 608, 640]
Define input resolution
image_size = 384 presize = 512
Note: You can lower the image_size to reduce training time at the cost of a potential decrease in accuracy.
Define Transforms
IceVision provides several default methods for data augmentation to help the model generalize. It automatically updates the bounding box information for an image based on the applied augmentations.
pd.DataFrame(tfms.A.aug_tfms(size=image_size, presize=presize))
| 0 |
SmallestMaxSize(always_apply=False, p=1, max_size=512, interpolation=1) |
| 1 |
HorizontalFlip(always_apply=False, p=0.5) |
| 2 |
ShiftScaleRotate(always_apply=False, p=0.5, shift_limit_x=(-0.0625, 0.0625), shift_limit_y=(-0.0625, 0.0625), scale_limit=(-0.09999999999999998, 0.10000000000000009), rotate_limit=(-15, 15), interpolation=1, border_mode=4, value=None, mask_value=None) |
| 3 |
RGBShift(always_apply=False, p=0.5, r_shift_limit=(-10, 10), g_shift_limit=(-10, 10), b_shift_limit=(-10, 10)) |
| 4 |
RandomBrightnessContrast(always_apply=False, p=0.5, brightness_limit=(-0.2, 0.2), contrast_limit=(-0.2, 0.2), brightness_by_max=True) |
| 5 |
Blur(always_apply=False, p=0.5, blur_limit=(1, 3)) |
| 6 |
OneOrOther([\n RandomSizedBBoxSafeCrop(always_apply=False, p=0.5, height=384, width=384, erosion_rate=0.0, interpolation=1),\n LongestMaxSize(always_apply=False, p=1, max_size=384, interpolation=1),\n], p=0.5) |
| 7 |
PadIfNeeded(always_apply=False, p=1.0, min_height=384, min_width=384, pad_height_divisor=None, pad_width_divisor=None, border_mode=0, value=[124, 116, 104], mask_value=None) |
pd.DataFrame(tfms.A.resize_and_pad(size=image_size))
| 0 |
LongestMaxSize(always_apply=False, p=1, max_size=384, interpolation=1) |
| 1 |
PadIfNeeded(always_apply=False, p=1.0, min_height=384, min_width=384, pad_height_divisor=None, pad_width_divisor=None, border_mode=0, value=[124, 116, 104], mask_value=None) |
train_tfms = tfms.A.Adapter([*tfms.A.aug_tfms(size=image_size, presize=presize), tfms.A.Normalize()]) valid_tfms = tfms.A.Adapter([*tfms.A.resize_and_pad(image_size), tfms.A.Normalize()])
Get normalization stats
We can extract the normalization stats from the tfms.A.Normalize() method for future use. We'll use these same stats when performing inference with the trained model.
mean = tfms.A.Normalize().mean std = tfms.A.Normalize().std mean, std
((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
Define Datasets
train_ds = Dataset(train_records, train_tfms) valid_ds = Dataset(valid_records, valid_tfms) train_ds, valid_ds
(<Dataset with 25466 items>, <Dataset with 6367 items>)
Apply augmentations to a training sample
samples = [train_ds[0] for _ in range(3)] show_samples(samples, ncols=3)

Define model type
model_type = models.mmdet.yolox
Define backbone
We will use a model pretrained on the COCO dataset rather than train a new model from scratch.
backbone = model_type.backbones.yolox_tiny_8x8(pretrained=True) pd.DataFrame.from_dict(backbone.__dict__, orient='index')
| model_name |
yolox |
| config_path |
/home/innom-dt/.icevision/mmdetection_configs/mmdetection_configs-2.16.0/configs/yolox/yolox_tiny_8x8_300e_coco.py |
| weights_url |
https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_tiny_8x8_300e_coco/yolox_tiny_8x8_300e_coco_20210806_234250-4ff3b67e.pth |
| pretrained |
TRUE |
Define batch size
bs = 32
Note: Adjust the batch size based on the available GPU memory.
Define DataLoaders
train_dl = model_type.train_dl(train_ds, batch_size=bs, num_workers=2, shuffle=True) valid_dl = model_type.valid_dl(valid_ds, batch_size=bs, num_workers=2, shuffle=False)
Note: Be careful when increasing the number of workers. There is a bug that significantly increases system memory usage with more workers.
Finetune the Model
Now, we can move on to training the model.
Instantiate the model
model = model_type.model(backbone=backbone(pretrained=True), num_classes=len(parser.class_map))
Define metrics
metrics = [COCOMetric(metric_type=COCOMetricType.bbox)]
Define Learner object
learn = model_type.fastai.learner(dls=[train_dl, valid_dl], model=model, metrics=metrics)
Find learning rate
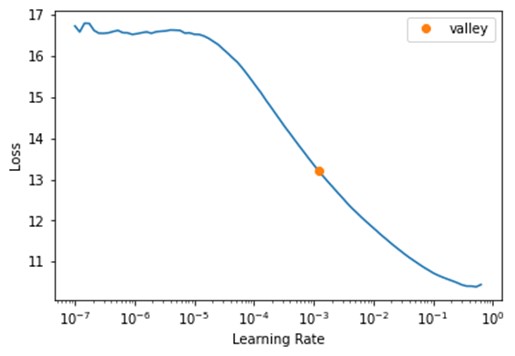
learn.lr_find()
SuggestedLRs(valley=0.0012022644514217973)
Define learning rate
lr = 1e-3
Define number of epochs
epochs = 20
Finetune model
learn.fine_tune(epochs, lr, freeze_epochs=1)
| epoch |
train_loss |
valid_loss |
COCOMetric |
time |
| 0 |
5.965206 |
5.44924 |
0.343486 |
3:31 |
| epoch |
train_loss |
valid_loss |
COCOMetric |
time |
| 0 |
3.767774 |
3.712888 |
0.572857 |
3:53 |
| 1 |
3.241024 |
3.204471 |
0.615708 |
3:50 |
| 2 |
2.993548 |
3.306303 |
0.578024 |
3:48 |
| 3 |
2.837985 |
3.157353 |
0.607766 |
3:51 |
| 4 |
2.714989 |
2.684248 |
0.68785 |
3:52 |
| 5 |
2.614549 |
2.545124 |
0.708479 |
3:49 |
| 6 |
2.466678 |
2.597708 |
0.677954 |
3:54 |
| 7 |
2.39562 |
2.459959 |
0.707709 |
3:53 |
| 8 |
2.295367 |
2.621239 |
0.679657 |
3:48 |
| 9 |
2.201542 |
2.636252 |
0.681469 |
3:47 |
| 10 |
2.177531 |
2.3526 |
0.723354 |
3:48 |
| 11 |
2.086292 |
2.376842 |
0.726306 |
3:47 |
| 12 |
2.009476 |
2.424167 |
0.712507 |
3:46 |
| 13 |
1.951761 |
2.324901 |
0.730893 |
3:49 |
| 14 |
1.916571 |
2.243153 |
0.739224 |
3:45 |
| 15 |
1.834777 |
2.208674 |
0.747359 |
3:52 |
| 16 |
1.802138 |
2.120061 |
0.757734 |
4:00 |
| 17 |
1.764611 |
2.187056 |
0.746236 |
3:53 |
| 18 |
1.753366 |
2.143199 |
0.754093 |
4:03 |
| 19 |
1.73574 |
2.154315 |
0.751422 |
3:55 |
Prepare Model for Export
Once the model finishes training, we need to modify it before exporting it. First, we willl prepare an input image to feed to the model.
Define method to convert a PIL Image to a Pytorch Tensor
def img_to_tensor(img:PIL.Image, mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]): # Convert image to tensor img_tensor = torch.Tensor(np.array(img)).permute(2, 0, 1) # Scale pixels values from [0,255] to [0,1] scaled_tensor = img_tensor.float().div_(255) # Prepare normalization tensors mean_tensor = tensor(mean).view(1,1,-1).permute(2, 0, 1) std_tensor = tensor(std).view(1,1,-1).permute(2, 0, 1) # Normalize tensor normalized_tensor = (scaled_tensor - mean_tensor) / std_tensor # Batch tensor return normalized_tensor.unsqueeze(dim=0)
Select a test image
annotation_df.iloc[4].to_frame()
|
|
00973fac-440e-4a56-b60c-2a06d5fb155d |
| bboxes |
[[0.40980118, 0.38144198, 0.08338464, 0.06229785], [0.6122035100000001, 0.6780825500000001, 0.04700606, 0.07640522]] |
| labels |
[call, no_gesture] |
| leading_hand |
right |
| leading_conf |
[[0.23925175, 0.28595301, 0.25055143, 0.20777627]] |
| user_id |
4bb3ee1748be58e05bd1193939735e57bb3c0ca59a7ee38901744d6b9e94632e |
Get the test image file path
test_img = PIL.Image.open(test_file).convert('RGB') test_img
Path('/home/innom-dt/.fastai/archive/../data/hagrid-sample-30k-384p/hagrid_30k/train_val_call/00973fac-440e-4a56-b60c-2a06d5fb155d.jpg')
Load the test image
test_img = PIL.Image.open(test_file).convert('RGB') test_img

Calculate valid input dimensions
input_h = test_img.height - (test_img.height % max_stride) input_w = test_img.width - (test_img.width % max_stride) input_h, input_w
(512, 384)
Crop image to supported resolution
test_img = test_img.crop_pad((input_w, input_h)) test_img

Convert image to a normalized tensor
test_tensor = img_to_tensor(test_img, mean=mean, std=std) test_tensor.shape
torch.Size([1, 3, 512, 384])
Inspect raw model output
Before making any changes, let's inspect the current model output.
model_output = model.cpu().forward_dummy(test_tensor.cpu())
The model currently organizes the output into three tuples. The first tuple contains three tensors storing the object class predictions using the three stride values. Recall that there are 19 object classes, excluding the background class added by IceVision.
The second tuple contains three tensors with the predicted bounding box coordinates and dimensions using the three stride values.
The third tuple contains three tensors with the confidence score for whether an object is present in a given section of the input image using the three stride values.
for raw_out in model_output: for out in raw_out: print(out.shape)
torch.Size([1, 19, 64, 48]) torch.Size([1, 19, 32, 24]) torch.Size([1, 19, 16, 12]) torch.Size([1, 4, 64, 48]) torch.Size([1, 4, 32, 24]) torch.Size([1, 4, 16, 12]) torch.Size([1, 1, 64, 48]) torch.Size([1, 1, 32, 24]) torch.Size([1, 1, 16, 12])
- 512/8 = 64, 512/16 = 32, 512/32 = 16
- 384/8 = 48, 384/16 = 24, 384/32 = 12
If we examine the end of a model from the official YOLOX repo, we can see the output looks a bit different.
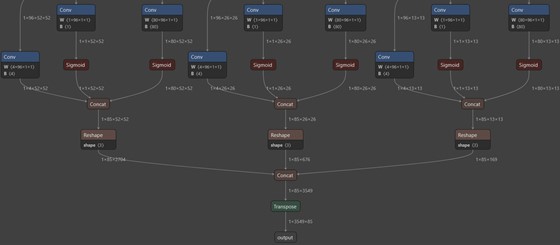
The official model first passes the tensors with the object class and "objectness" scores through sigmoid functions. It then combines the three tensors for each stride value into a single tensor before combining the resulting three tensors into a single flat array.
We can apply these same steps to our model by adding a new forward function using monkey patching.
Define custom forward function for exporting the model
def forward_export(self, input_tensor): # Get raw model output model_output = self.forward_dummy(input_tensor.cpu()) # Extract class scores cls_scores = model_output[0] # Extract bounding box predictions bbox_preds = model_output[1] # Extract objectness scores objectness = model_output[2] stride_8_cls = torch.sigmoid(cls_scores[0]) stride_8_bbox = bbox_preds[0] stride_8_objectness = torch.sigmoid(objectness[0]) stride_8_cat = torch.cat((stride_8_bbox, stride_8_objectness, stride_8_cls), dim=1) stride_8_flat = torch.flatten(stride_8_cat, start_dim=2) stride_16_cls = torch.sigmoid(cls_scores[1]) stride_16_bbox = bbox_preds[1] stride_16_objectness = torch.sigmoid(objectness[1]) stride_16_cat = torch.cat((stride_16_bbox, stride_16_objectness, stride_16_cls), dim=1) stride_16_flat = torch.flatten(stride_16_cat, start_dim=2) stride_32_cls = torch.sigmoid(cls_scores[2]) stride_32_bbox = bbox_preds[2] stride_32_objectness = torch.sigmoid(objectness[2]) stride_32_cat = torch.cat((stride_32_bbox, stride_32_objectness, stride_32_cls), dim=1) stride_32_flat = torch.flatten(stride_32_cat, start_dim=2) full_cat = torch.cat((stride_8_flat, stride_16_flat, stride_32_flat), dim=2) return full_cat.permute(0, 2, 1)
Add custom forward function to model
model.forward_export = forward_export.__get__(model)
Verify output shape
Let's verify the new forward function works as intended. The output should have a batch size of 1 and contain 4032 elements, given the input dimensions (calculated earlier), each with 24 values (19 classes + 1 objectness score + 4 bounding box values).
model.forward_export(test_tensor).shape
torch.Size([1, 4032, 24])
We need to replace the current forward function before exporting the model.
Create a backup of the default model forward function
We can create a backup of the original forward function just in case.
origin_forward = model.forward
Replace model forward function with custom function
model.forward = model.forward_export
Verify output shape
model(test_tensor).shape
torch.Size([1, 4032, 24])
Export the Model
The OpenVINO™ model conversion script does not support PyTorch models, so we need to export the trained model to ONNX. We can then convert the ONNX model to OpenVINO's IR format.
Define ONNX file name
onnx_file_name = f"{dataset_path.name}-{type(model).__name__}.onnx" onnx_file_name
'hagrid-sample-30k-384p-YOLOX.onnx'
Export trained model to ONNX
torch.onnx.export(model, test_tensor, onnx_file_name, export_params=True, opset_version=11, do_constant_folding=True, input_names = ['input'], output_names = ['output'], dynamic_axes={'input': {2 : 'height', 3 : 'width'}} )
Simplify ONNX model
As mentioned earlier, this step is entirely optional.
import onnx from onnxsim import simplify
# load model onnx_model = onnx.load(onnx_file_name) # convert model model_simp, check = simplify(onnx_model) # save model onnx.save(model_simp, onnx_file_name)
Now we can export the ONNX model to OpenVINO's IR format.
Import OpenVINO™ Dependencies
Define export directory
output_dir = Path('./') output_dir
Path('.')
Define path for OpenVINO™ IR xml model file
The conversion script generates an XML file containing information about the model architecture and a BIN file that stores the trained weights. We need both files to perform inference. OpenVINO™ uses the same name for the BIN file as provided for the XML file.
ir_path = Path(f"{onnx_file_name.split('.')[0]}.xml") ir_path
Path('hagrid-sample-30k-384p-YOLOX.xml')
Define arguments for model conversion script
OpenVINO™ provides the option to include the normalization stats in the IR model. That way, we don't need to account for different normalization stats when performing inference with multiple models. We can also convert the model to FP16 precision to reduce file size and improve inference speed.
# Construct the command for Model Optimizer mo_command = f"""mo --input_model "{onnx_file_name}" --input_shape "[1,3, {image_size}, {image_size}]" --mean_values="{mean}" --scale_values="{std}" --data_type FP16 --output_dir "{output_dir}" """ mo_command = " ".join(mo_command.split()) print("Model Optimizer command to convert the ONNX model to OpenVINO:") display(Markdown(f"`{mo_command}`"))
Model Optimizer command to convert the ONNX model to OpenVINO™:
mo --input_model "hagrid-sample-30k-384p-YOLOX.onnx" --input_shape "[1,3, 384, 384]" --mean_values="(0.485, 0.456, 0.406)" --scale_values="(0.229, 0.224, 0.225)" --data_type FP16 --output_dir "."
Convert ONNX model to OpenVINO™ IR
if not ir_path.exists(): print("Exporting ONNX model to IR... This may take a few minutes.") mo_result = %sx $mo_command print("\n".join(mo_result)) else: print(f"IR model {ir_path} already exists.") Exporting ONNX model to IR... This may take a few minutes. Model Optimizer arguments: Common parameters: - Path to the Input Model: /media/innom-dt/Samsung_T3/Projects/GitHub/icevision-openvino-unity-tutorial/notebooks/hagrid-sample-30k-384p-YOLOX.onnx - Path for generated IR: /media/innom-dt/Samsung_T3/Projects/GitHub/icevision-openvino-unity-tutorial/notebooks/. - IR output name: hagrid-sample-30k-384p-YOLOX - Log level: ERROR - Batch: Not specified, inherited from the model - Input layers: Not specified, inherited from the model - Output layers: Not specified, inherited from the model - Input shapes: [1,3, 384, 384] - Source layout: Not specified - Target layout: Not specified - Layout: Not specified - Mean values: (0.485, 0.456, 0.406) - Scale values: (0.229, 0.224, 0.225) - Scale factor: Not specified - Precision of IR: FP16 - Enable fusing: True - User transformations: Not specified - Reverse input channels: False - Enable IR generation for fixed input shape: False - Use the transformations config file: None Advanced parameters: - Force the usage of legacy Frontend of Model Optimizer for model conversion into IR: False - Force the usage of new Frontend of Model Optimizer for model conversion into IR: False OpenVINO runtime found in: /home/innom-dt/mambaforge/envs/icevision/lib/python3.8/site-packages/openvino OpenVINO runtime version: 2022.1.0-7019-cdb9bec7210-releases/2022/1 Model Optimizer version: 2022.1.0-7019-cdb9bec7210-releases/2022/1 [ WARNING ] Detected not satisfied dependencies: numpy: installed: 1.23.1, required: < 1.20 Please install required versions of components or run pip installation pip install openvino-dev [ SUCCESS ] Generated IR version 11 model. [ SUCCESS ] XML file: /media/innom-dt/Samsung_T3/Projects/GitHub/icevision-openvino-unity-tutorial/notebooks/hagrid-sample-30k-384p-YOLOX.xml [ SUCCESS ] BIN file: /media/innom-dt/Samsung_T3/Projects/GitHub/icevision-openvino-unity-tutorial/notebooks/hagrid-sample-30k-384p-YOLOX.bin [ SUCCESS ] Total execution time: 0.47 seconds. [ SUCCESS ] Memory consumed: 115 MB. It's been a while, check for a new version of Intel(R) Distribution of OpenVINO(TM) toolkit here https://software.intel.com/content/www/us/en/develop/tools/openvino-toolkit/download.html?cid=other&source=prod&campid=ww_2022_bu_IOTG_OpenVINO-2022-1&content=upg_all&medium=organic or on the GitHub* [ INFO ] The model was converted to IR v11, the latest model format that corresponds to the source DL framework input/output format. While IR v11 is backwards compatible with OpenVINO Inference Engine API v1.0, please use API v2.0 (as of 2022.1) to take advantage of the latest improvements in IR v11. Find more information about API v2.0 and IR v11 at https://docs.openvino.ai
Verify OpenVINO™ Inference
Now, we can verify the OpenVINO™ model works as desired using the test image.
Get available OpenVINO™ compute devices
ie = Core() devices = ie.available_devices for device in devices: device_name = ie.get_property(device_name=device, name="FULL_DEVICE_NAME") print(f"{device}: {device_name}")
CPU: 11th Gen Intel(R) Core(TM) i7-11700K @ 3.60GHz
Prepare input image for OpenVINO™ IR model
# Convert image to tensor img_tensor = torch.Tensor(np.array(test_img)).permute(2, 0, 1) # Scale pixels values from [0,255] to [0,1] scaled_tensor = img_tensor.float().div_(255)
input_image = scaled_tensor.unsqueeze(dim=0) input_image.shape
torch.Size([1, 3, 512, 384])
Test OpenVINO™ IR model
# Load the network in Inference Engine ie = Core() model_ir = ie.read_model(model=ir_path) model_ir.reshape(input_image.shape) compiled_model_ir = ie.compile_model(model=model_ir, device_name="CPU") # Get input and output layers input_layer_ir = next(iter(compiled_model_ir.inputs)) output_layer_ir = next(iter(compiled_model_ir.outputs)) # Run inference on the input image res_ir = compiled_model_ir([input_image])[output_layer_ir]
res_ir.shape
(1, 4032, 24)
The output shape is correct, meaning we can move on to the post-processing steps.
Define Post-processing Steps
To process the model output, we need to iterate through each of the 4032 object proposals and save the ones that meet a user-defined confidence threshold (e.g., 50%). We then filter out the redundant proposals (i.e., detecting the same object multiple times) from that subset using Non-Maximum Suppression (NMS).
Define method to generate offset values to navigate the raw model output
We will first define a method that generates offset values based on the input dimensions and stride values, which we can use to traverse the output array.
def generate_grid_strides(height, width, strides=[8, 16, 32]): grid_strides = [] # Iterate through each stride value for stride in strides: # Calculate the grid dimensions grid_height = height // stride grid_width = width // stride # Store each combination of grid coordinates for g1 in range(grid_height): for g0 in range(grid_width): grid_strides.append({'grid0':g0, 'grid1':g1, 'stride':stride }) return grid_strides
Generate offset values to navigate model output
grid_strides = generate_grid_strides(test_img.height, test_img.width, strides) len(grid_strides)
4032
pd.DataFrame(grid_strides).head()
|
|
grid0 |
grid1 |
stride |
| 0 |
0 |
0 |
8 |
| 1 |
1 |
0 |
8 |
| 2 |
2 |
0 |
8 |
| 3 |
3 |
0 |
8 |
| 4 |
4 |
0 |
8 |
Define method to generate object detection proposals from the raw model output
Next, we will define a method to iterate through the output array and decode the bounding box information for each object proposal. As mentioned earlier, we will only keep the ones with high enough confidence score. The model predicts the center coordinates of a bounding box, but we will store the coordinates for the top-left corner as that is what the ImageDraw.Draw.rectangle() method expects as input.
def generate_yolox_proposals(model_output, proposal_length, grid_strides, bbox_conf_thresh=0.3): proposals = [] # Obtain the number of classes the model was trained to detect num_classes = proposal_length - 5 for anchor_idx in range(len(grid_strides)): # Get the current grid and stride values grid0 = grid_strides[anchor_idx]['grid0'] grid1 = grid_strides[anchor_idx]['grid1'] stride = grid_strides[anchor_idx]['stride'] # Get the starting index for the current proposal start_idx = anchor_idx * proposal_length # Get the coordinates for the center of the predicted bounding box x_center = (model_output[start_idx + 0] + grid0) * stride y_center = (model_output[start_idx + 1] + grid1) * stride # Get the dimensions for the predicted bounding box w = np.exp(model_output[start_idx + 2]) * stride h = np.exp(model_output[start_idx + 3]) * stride # Calculate the coordinates for the upper left corner of the bounding box x0 = x_center - w * 0.5 y0 = y_center - h * 0.5 # Get the confidence score that an object is present box_objectness = model_output[start_idx + 4] # Initialize object struct with bounding box information obj = { 'x0':x0, 'y0':y0, 'width':w, 'height':h, 'label':0, 'prob':0 } # Find the object class with the highest confidence score for class_idx in range(num_classes): # Get the confidence score for the current object class box_cls_score = model_output[start_idx + 5 + class_idx] # Calculate the final confidence score for the object proposal box_prob = box_objectness * box_cls_score # Check for the highest confidence score if (box_prob > obj['prob']): obj['label'] = class_idx obj['prob'] = box_prob # Only add object proposals with high enough confidence scores if obj['prob'] > bbox_conf_thresh: proposals.append(obj) # Sort the proposals based on the confidence score in descending order proposals.sort(key=lambda x:x['prob'], reverse=True) return proposals
Define minimum confidence score for keeping bounding box proposals
bbox_conf_thresh = 0.5
Process raw model output
proposals = generate_yolox_proposals(res_ir.flatten(), res_ir.shape[2], grid_strides, bbox_conf_thresh) proposals_df = pd.DataFrame(proposals) proposals_df['label'] = proposals_df['label'].apply(lambda x: labels[x]) proposals_df
|
|
x0 |
y0 |
width |
height |
label |
prob |
| 0 |
233.4538 |
345.3199 |
20.23704 |
39.23757 |
no_gesture | 0.89219 |
| 1 |
233.412 |
345.0793 |
20.29808 |
39.36903 |
no_gesture | 0.883036 |
| 2 |
233.4828 |
345.0702 |
20.27387 |
39.55605 |
no_gesture | 0.881625 |
| 3 |
233.2261 |
345.559 |
20.65354 |
38.9854 |
no_gesture | 0.876668 |
| 4 |
233.3543 |
345.4665 |
20.35107 |
38.96801 |
no_gesture | 0.872296 |
| 5 |
153.3313 |
193.4108 |
38.27451 |
35.17633 |
call | 0.870502 |
| 6 |
233.5837 |
345.2619 |
20.34744 |
39.5174 |
no_gesture | 0.868382 |
| 7 |
153.6668 |
193.2385 |
38.14518 |
35.97664 |
call | 0.866106 |
| 8 |
154.8664 |
194.0216 |
35.85714 |
34.74982 |
call | 0.86208 |
| 9 |
155.0964 |
193.6967 |
35.6629 |
35.1854 |
call | 0.861144 |
| 10 |
154.9317 |
193.5331 |
35.84914 |
35.37304 |
call | 0.859096 |
| 11 |
154.9881 |
193.9212 |
35.8509 |
34.87816 |
call | 0.856778 |
| 12 |
153.3711 |
193.6701 |
37.45903 |
35.08551 |
call | 0.832275 |
| 13 |
154.885 |
193.3931 |
37.16154 |
35.75605 |
call | 0.814937 |
| 14 |
154.8073 |
193.5866 |
37.24771 |
34.8526 |
call | 0.803999 |
| 15 |
233.4585 |
345.055 |
20.22681 |
39.54984 |
no_gesture | 0.797995 |
| 16 |
233.2166 |
346.1495 |
20.41456 |
38.4012 |
no_gesture | 0.794114 |
| 17 |
233.6754 |
345.0605 |
20.19443 |
39.1669 |
no_gesture | 0.612079 |
We know the test image contains one call gesture and one idle hand. The model seems pretty confident about the locations of those two hands as the bounding box values are nearly identical across the no_gesture predictions and among the call predictions.
We can filter out the redundant predictions by checking how much the bounding boxes overlap. When two bounding boxes overlap beyond a user-defined threshold, we keep the one with a higher confidence score.
Define function to calculate the union area of two bounding boxes
def calc_union_area(a, b): x = min(a['x0'], b['x0']) y = min(a['y0'], b['y0']) w = max(a['x0']+a['width'], b['x0']+b['width']) - x h = max(a['y0']+a['height'], b['y0']+b['height']) - y return w*h
Define function to calculate the intersection area of two bounding boxes
def calc_inter_area(a, b): x = max(a['x0'], b['x0']) y = max(a['y0'], b['y0']) w = min(a['x0']+a['width'], b['x0']+b['width']) - x h = min(a['y0']+a['height'], b['y0']+b['height']) - y return w*h
Define function to sort bounding box proposals using Non-Maximum Suppression
def nms_sorted_boxes(nms_thresh=0.45): proposal_indices = [] # Iterate through the object proposals for i in range(len(proposals)): a = proposals[i] keep = True # Check if the current object proposal overlaps any selected objects too much for j in proposal_indices: b = proposals[j] # Calculate the area where the two object bounding boxes overlap inter_area = calc_inter_area(a, b) # Calculate the union area of both bounding boxes union_area = calc_union_area(a, b) # Ignore object proposals that overlap selected objects too much if inter_area / union_area > nms_thresh: keep = False # Keep object proposals that do not overlap selected objects too much if keep: proposal_indices.append(i) return proposal_indices
Define threshold for sorting bounding box proposals
nms_thresh = 0.45
Sort bouning box proposals using NMS
proposal_indices = nms_sorted_boxes(nms_thresh) proposal_indices
[0, 5]
Filter excluded bounding box proposals
proposals_df.iloc[proposal_indices]
|
|
x0 |
y0 |
width |
height |
label |
prob |
| 0 |
233.4538 |
345.3199 |
20.23704 |
39.23757 |
no_gesture | 0.89219 |
| 5 |
153.3313 |
193.4108 |
38.27451 |
35.17633 |
call | 0.870502 |
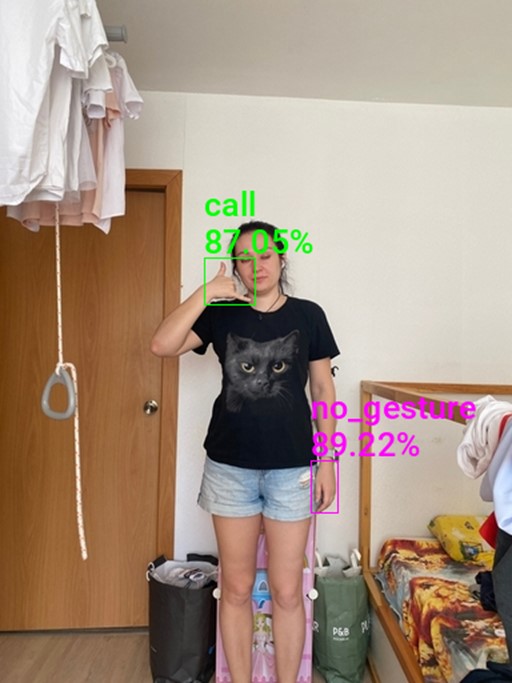
Now, we have a single prediction for an idle hand and a single prediction for a call sign.
Generate Colormap
Before we annotate the input image with the predicted bounding boxes, let's generate a colormap for the object classes.
Import library for generating color palette
from distinctipy import distinctipy
Generate a visually distinct color for each label
colors = distinctipy.get_colors(len(labels))
Display the generated color palette
distinctipy.color_swatch(colors)
Set precision for color values
precision = 5
Round color values to specified precision
colors = [[np.round(ch, precision) for ch in color] for color in colors] colors
[[0.0, 1.0, 0.0], [1.0, 0.0, 1.0], [0.0, 0.5, 1.0], [1.0, 0.5, 0.0], [0.5, 0.75, 0.5], [0.30555, 0.01317, 0.67298], [0.87746, 0.03327, 0.29524], [0.05583, 0.48618, 0.15823], [0.95094, 0.48649, 0.83322], [0.0884, 0.99616, 0.95391], [1.0, 1.0, 0.0], [0.52176, 0.27352, 0.0506], [0.55398, 0.36059, 0.57915], [0.08094, 0.99247, 0.4813], [0.49779, 0.8861, 0.03131], [0.49106, 0.6118, 0.97323], [0.98122, 0.81784, 0.51752], [0.02143, 0.61905, 0.59307], [0.0, 0.0, 1.0]]
Annotate image using bounding box proposals
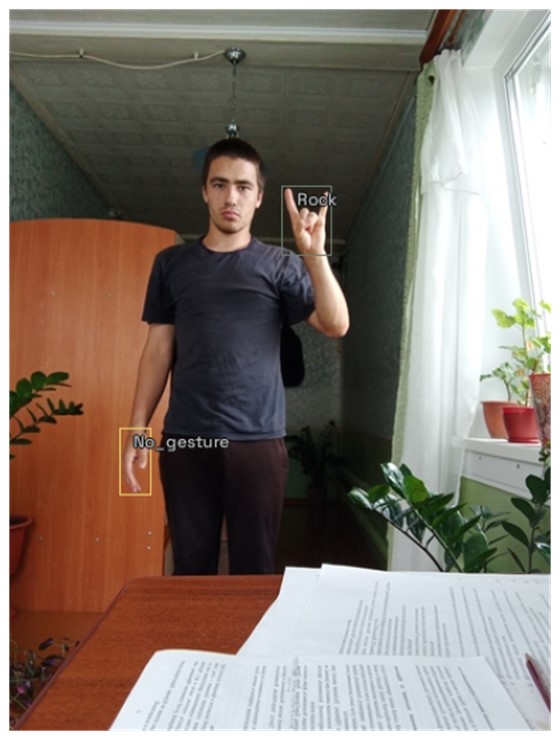
annotated_img = test_img.copy() draw = ImageDraw.Draw(annotated_img) fnt_size = 25 for i in proposal_indices: x, y, w, h, l, p = proposals[i].values() shape = (x, y, x+w, y+h) color = tuple([int(ch*255) for ch in colors[proposals[i]['label']]]) draw.rectangle(shape, outline=color) fnt = PIL.ImageFont.truetype("KFOlCnqEu92Fr1MmEU9vAw.ttf", fnt_size) draw.multiline_text((x, y-fnt_size*2-5), f"{labels[l]}\n{p*100:.2f}%", font=fnt, fill=color) print(annotated_img.size) annotated_img
(384, 512)
Create JSON colormap
We can export the colormap to a JSON file and import it into the Unity* project. That way, we can easily swap colormaps for models trained on different datasets without changing any code.
color_map = {'items': list()} color_map['items'] = [{'label': label, 'color': color} for label, color in zip(labels, colors)] color_map
{'items': [{'label': 'call', 'color': [0.0, 1.0, 0.0]}, {'label': 'no_gesture', 'color': [1.0, 0.0, 1.0]}, {'label': 'dislike', 'color': [0.0, 0.5, 1.0]}, {'label': 'fist', 'color': [1.0, 0.5, 0.0]}, {'label': 'four', 'color': [0.5, 0.75, 0.5]}, {'label': 'like', 'color': [0.30555, 0.01317, 0.67298]}, {'label': 'mute', 'color': [0.87746, 0.03327, 0.29524]}, {'label': 'ok', 'color': [0.05583, 0.48618, 0.15823]}, {'label': 'one', 'color': [0.95094, 0.48649, 0.83322]}, {'label': 'palm', 'color': [0.0884, 0.99616, 0.95391]}, {'label': 'peace', 'color': [1.0, 1.0, 0.0]}, {'label': 'peace_inverted', 'color': [0.52176, 0.27352, 0.0506]}, {'label': 'rock', 'color': [0.55398, 0.36059, 0.57915]}, {'label': 'stop', 'color': [0.08094, 0.99247, 0.4813]}, {'label': 'stop_inverted', 'color': [0.49779, 0.8861, 0.03131]}, {'label': 'three', 'color': [0.49106, 0.6118, 0.97323]}, {'label': 'three2', 'color': [0.98122, 0.81784, 0.51752]}, {'label': 'two_up', 'color': [0.02143, 0.61905, 0.59307]}, {'label': 'two_up_inverted', 'color': [0.0, 0.0, 1.0]}]}
Export colormap
import json color_map_file_name = f"{dataset_path.name}-colormap.json" with open(color_map_file_name, "w") as write_file: json.dump(color_map, write_file) color_map_file_name
'hagrid-sample-30k-384p-colormap.json'
Summary
In this post, we finetuned an object detection model using the IceVision library and exported it as an OpenVINO™ IR model. Part 2 will cover creating a dynamic link library (DLL) file in Visual Studio to perform inference with this model using OpenVINO™.
In This Series
End-to-End Object Detection for Unity* with IceVision* and OpenVINO™ Toolkit Part 1
End-to-End Object Detection for Unity* with IceVision* and OpenVINO™ Toolkit Part 2
End-to-End Object Detection for Unity* with IceVision* and OpenVINO™ Toolkit Part 3
Beginner Tutorial
Fastai to Unity* Beginner Tutorial Pt. 1
Related Links
In-Game Style Transfer Tutorial in Unity*
Targeted GameObject Style Transfer Tutorial in Unity*
Developing OpenVINO™ Toolkit Inferencing Plugin for Unity* Tutorial
Developing OpenVINO™ Toolkit Object Detection Inferencing Plugin for Unity*
Project Resources